Teorema de Gauss-Bonnet
O obxectivo deste tema é proba-los teoremas de Gauss-Bonnet, que relacionan dúas nocións moi diferentes: un concepto local puramente xeométrico como é a curvatura de Gauss, con outro global de corte topolóxico chamado a característica de Euler.
Trataremos primeiro a fórmula de Gauss-Bonnet. Durante este tema explicarémo-la notación involucrada nesta, e desenvolverémo-la maquinaria necesaria para probala.
\[ \int_R K+\int_{\partial R}\kappa_g+\sum_{i=1}^k\epsilon_i=2\pi\chi(R). \]
Como consecuencia do anterior resultado (ou máis ben da súa demostración), pode probarse o Teorema de Gauss-Bonnet para superficies compactas.
\[ \int_S K = 2\pi\chi(S). \]
Ademais de seren interesantes por eles mesmos, tamén deduciremos algunhas conclusións xeométricas. Algúns destes resultados son coñecidos da xeometría euclidiana, mentres que outros pertencen propiamente á xeometría diferencial.
Ángulo de rotación dunha curva
Empezamos con algúns resultados para curvas planas. Nesta sección supoñemos que $\R^2$ está orientado de acordo á orientación dada pola base canónica.
En primeiro lugar tomaremos unha curva regular ${\alpha\colon[a,b]\to\R^2}$. Como é habitual denotamos por $\mathbf{t}(t)$ o seu vector tanxente unitario. Podemos pensar este como unha aplicación ${\mathbf{t}\colon[a,b]\to\mathbb{S}^1}$ que vai na circunferencia de radio $1$.
Sexa $\varepsilon\colon\R\to\mathbb{S}^1$, $t\mapsto (\cos t,\sin t)$, a aplicación de revestimento da recta no círculo. Esta aplicación é unha función diferenciable.
Sexa ${f\colon [a,b]\to\mathbb{S}^1}$ un camiño, e $t_0\in\varepsilon^{-1}(f(a))$. Entón existe un único levantamento ${\tilde{f}\colon[a,b]\to\R}$ tal que $\varepsilon\circ\tilde{f}=f$ e $\tilde{f}(a)=t_0$. Calquera outro levantamento difire de $\tilde{f}$ en sumar unha constante.
Sexa $\theta_0$ o ángulo que forma $\mathbf{t}(a)$ co eixo $x$. Este número está determinado salvo un múltiplo enteiro de $2\pi$. Pola propiedade de levantamento único de camiños, existe unha única aplicación ${\theta\colon[a,b]\to\R}$ tal que \[ \mathbf{t}(t)=(\cos\theta(t),\sin\theta(t)), \] e $\theta(a)=\theta_0$. Calquera par de funcións que satisfagan esta condición diferéncianse na suma dun múltiplo enteiro de $2\pi$. Ademais, como a aplicación revestimento $\varepsilon(t)=(\cos t,\sin t)\equiv e^{it}$ é diferenciable, e ten, localmente, inversa diferenciable (o logaritmo complexo nun conxunto axeitado), deducimos que $\theta$ é unha función tamén diferenciable. Unha función como esta chámase unha función ángulo de rotación para a curva $\alpha$.
Sexa ${f\colon [a,b]\to\mathbb{S}^1}$ un camiño, e $t_0\in\varepsilon^{-1}(f(a))$. Entón existe un único levantamento ${\tilde{f}\colon[a,b]\to\R}$ tal que $\varepsilon\circ\tilde{f}=f$ e $\tilde{f}(a)=t_0$. Calquera outro levantamento difire de $\tilde{f}$ en sumar unha constante.
O argumento que acabamos de facer é válido para curvas que só son continuas, xa que só depende da propiedade de levantamento de curvas en $\mathbb{S}^1$ (se ben entón a función $\theta$ non tería porqué ser diferenciable). No caso de que a curva sexa diferenciable existe un xeito alternativo que nos permite calcula-lo ángulo de rotación. O interesante do resultado seguinte non é tanto o seu enunciado, que xa foi derivado anteriormente, senón a fórmula coa que se calcula o ángulo de rotación dada na súa demostración.
Sexa ${\alpha\colon[a,b]\to\R^2}$ unha curva plana regular. Sexa $t_0\in[a,b]$ e $\theta_0$ un ángulo que forman $\alpha'(t_0)$ e o eixo $x$. Entón existe un ángulo de rotación $\theta$ para $\alpha$ tal que $\theta(t_0)=\theta_0$.
Podemos escribir $\alpha(t)=(u(t),\,v(t))$, e así \[ \mathbf{t}= \Bigl(\frac{u'}{\sqrt{(u')^2+(v')^2}},\, \frac{v'}{\sqrt{(u')^2+(v')^2}}\Bigr). \] Por comodidade chamamos \[ \begin{aligned} x &{}=\frac{u'}{\sqrt{(u')^2+(v')^2}},\\ y &{}=\frac{v'}{\sqrt{(u')^2+(v')^2}}, \end{aligned} \] de xeito que $\mathbf{t}(t)=(x(t),\,y(t))$. Nótese que $x^2+y^2=1$.
Definimos \[ \theta(t)= \theta_0 +\int_{t_0}^t\bigl(x(s)y'(s)-y(s)x'(s)\bigr)\textup{d}s. \]
Claramente $\theta(t_0)=\theta_0$. Para remata-la demostración chega con ver que a función \[ f(t)=\bigl(x(t)-\cos\theta(t)\bigr)^2+\bigl(y(t)-\sin\theta(t)\bigr)^2 \] é identicamente nula.
Por definición de $\theta_0$ temos \[ f(t_0)=\bigl(x(t_0)-\cos\theta_0\bigr)^2+\bigl(y(t_0)-\sin\theta_0\bigr)^2=0. \] Por outra banda, empregando $\theta'=xy'-yx'$, obtemos \[ \begin{aligned} f'={} &2(x-\cos\theta)(x'+\theta'\sin\theta) +2(y-\sin\theta)(y'-\theta'\cos\theta)\\ {}={}&2(xx'+yy') -2\bigl(x'+y\theta'\bigr)\cos\theta -2\bigl(y'-x\theta'\bigr)\sin\theta\\ {}={}&{}2(xx'+yy')\\ &{}-2\bigl(x'+y(xy'-yx')\bigr)\cos\theta\\ &{}-2\bigl(y'-x(xy'-yx')\bigr)\sin\theta\\ {}={}&{}2(xx'+yy')\\ &{}-2\bigl(x'(1-y^2)+xyy'\bigr)\cos\theta\\ &{}-2\bigl(y'(1-x^2)+xx'y\bigr)\sin\theta\\ {}={}&{}2(xx'+yy')(1-x\cos\theta-y\sin\theta)\\ {}={}&{}(x^2+y^2)'(1-x\cos\theta-y\sin\theta)=0, \end{aligned} \] de onde se deduce que $f=0$ como queriamos probar.
Supoñamos agora que $\alpha$ é pechada, é dicir, $\alpha(a)=\alpha(b)$ e $\alpha'(a)=\alpha'(b)$. Entón o ángulo de rotación $\theta(b)-\theta(a)$ é un múltiplo enteiro de $2\pi$, xa que nese caso $\cos\theta(a)=\cos\theta(b)$, $\sin\theta(a)=\sin\theta(b)$.
O índice de rotación dunha curva pechada plana regular ${\alpha\colon[a,b]\to\R^2}$ defínese como \[ \rho(\alpha)=\frac{\theta(b)-\theta(a)}{2\pi}, \] sendo $\theta$ un ángulo de rotación.
Nótese que se $\tilde{\theta}$ é outro ángulo de rotación, entón $\tilde{\theta}(t)=\theta(t)+2k\pi$, $k\in\mathbb{Z}$, e así o índice de rotación está ben definido e non depende da elección da función ángulo de rotación.
Nas seguintes figuras preséntanse varios índices de rotación.
Necesitamos xeneraliza-la anterior definición para unha clase máis ampla de curvas: as curvas admisibles ou regulares a trozos. Para iso necesitaremos ter en conta os posibles saltos que faga o vector tanxente unitario nos lugares onde se perde a regularidade.
Recordemos que unha curva admisible é unha aplicación continua ${\alpha\colon[a,b]\to \R^2}$ tal que existe unha partición $a=t_0<t_1<\dots<t_k=b$ de xeito que $\alpha_{\vert [t_i,t_{i+1}]}$ é unha curva regular para cada $i=1,\dots,k$. Os puntos $\alpha(t_i)$ son os vértices da curva. Recordemos \[ \begin{aligned} \alpha'(t_i^-) &{}=\lim_{t\to t_i^-}\alpha'(t_i),\\ \alpha'(t_i^+) &{}=\lim_{t\to t_i^+}\alpha'(t_i). \end{aligned} \]
Tal curva pode ser parametrizada por parámetro lonxitude de arco a trozos. Ademais, nos puntos de diferenciabilidade de $\alpha$ podemos defini-lo seu vector tanxente unitario $\mathbf{t}$ do xeito habitual. Nos vértices da curva témo-los vectores tanxentes unitarios pola esquerda e pola dereita: \[ \begin{aligned} \mathbf{t}(t_i^-) &{}=\lim_{t\to t_i^-}\mathbf{t}(t_i),\\ \mathbf{t}(t_i^+) &{}=\lim_{t\to t_i^+}\mathbf{t}(t_i). \end{aligned} \]
No que segue suporemos que cada vértice $\alpha(t_i)$ é un vértice de verdade, é dicir, que $\mathbf{t}(t_i^-)\neq\mathbf{t}(t_i^+)$
Se $\mathbf{t}(t_i^-)$ e $\mathbf{t}(t_i^+)$ son opostos, dicimos que o vértice forma unha cúspide. Neste caso hai que decidir se o ángulo é $\pi$ ou $-\pi$. Neste curso non trataremos este caso, aínda que pode definirse por continuidade.
Dise que ${\alpha\colon[a,b]\to S}$ é unha curva pechada simple se $\alpha(a)=\alpha(b)$ e ${\alpha\colon[a,b)\to \R^2}$ é unha función inxectiva.
Supoñamos agora que ${\alpha\colon[a,b]\to\R^2}$ é unha curva plana admisible pechada simple. Nótese tamén que farémo-lo pequeno abuso de notación (xa que a curva é pechada, $\alpha(a)=\alpha(b)$), de que $\alpha'(t_k^+)=\alpha'(b^+)\equiv\alpha'(a^+)=\alpha'(t_0^+)$.
Sexa ${\alpha\colon[a,b]\to\R^2}$ unha curva pechada simple e $C=\alpha([a,b])$. Entón $\R^2\setminus C$ ten exactamente dúas compoñentes conexas con fronteira común $C$. Unha desas compoñentes conexas é relativamente compacta e simplemente conexa, mentres que a outra non é.
Polo teorema da curva de Jordan, $\alpha([a,b])$ divide o plano en exactamente dúas rexións, unhas das cales, chamémoslle $R$, é relativamente compacta e simplemente conexa. Esta rexión $R$ chámase a rexión interior.
Recordemos que estamos supoñendo que o plano $\R^2$ está orientado de acordo á base canónica. Dicimos que $\alpha$ está positivamente orientada se $J\alpha'(s)$ apunta ó interior de $\alpha$, é dicir, se $\beta\colon [0,\epsilon)\to \overline{R}$ é tal que $\beta(0)=\alpha(t)$ e $\beta'(0)$ non é colinear con $\alpha'(t)$, entón $\langle\beta'(0),J\alpha'(0)\rangle > 0$.
Sexa ${\alpha\colon[a,b]\to\R^2}$ unha curva plana admisible con respecto da partición $a=t_0<t_1<\dots<t_k=b$. Defínese o ángulo exterior no vértice $\alpha(t_i)$, $i\in\{1,\dots,k\}$, como o ángulo orientado de $\mathbf{t}(t_i^-)$ a $\mathbf{t}(t_i^+)$. Por tanto, vén determinado polo número $\epsilon_i\in(-\pi,\pi)$ tal que \[ \mathbf{t}(t_i^+)= \bigl(\cos\epsilon_i\bigr)\mathbf{t}(t_i^-) +\bigl(\sin\epsilon_i\bigr)J\mathbf{t}(t_i^-), \] sendo $J$ a estructura complexa de $\R^2$ (con respecto da orientación elexida).
O ángulo interior defínese como $\varphi_i=\pi-\epsilon_i$.
Fixémonos en que tal e como está definido, $0<\varphi_i<2\pi$.
O ángulo $\epsilon_i$ pode ser positivo ou negativo dependendo da orientación e do sentido de xiro.
A continuación pasamos a defini-lo ángulo de rotación dunha curva admisible. Basicamente a idea é emprega-la definición anterior para curvas regulares nos intervalos en que a curva admisible é regular, e facer un "salto" nos vértices igual ó ángulo exterior.
Sexa ${\alpha\colon[a,b]\to\R^2}$ unha curva admisible na partición $a=t_0<t_1<\dots<t_k=b$. Defínese unha función ángulo de rotación como unha función continua a trozos ${\theta\colon[a,b]\to\R}$ que satisfai \[ \mathbf{t}(t)=\bigl(\cos\theta(t),\sin\theta(t)\bigr), \] en cada intervalo $(t_{i-1},t_i)$, e que é continua pola dereita en cada $t_i$ con \[ \theta(t_i)=\lim_{t\to t_i^-}\theta(t)+\epsilon_i, \] sendo $\epsilon_i$ o ángulo exterior en $\alpha(t_i)$, e $i\in\{1,\dots,k\}$.
Unha función ángulo de rotación sempre existe: empézase definindo $\theta(t)$ en $[t_0,t_1)$, como fixemos anteriormente para unha curva regular, para algunha elección de $\theta(t_0)$; despois defínese $\theta(t)$ de xeito análogo en $[t_1,t_2)$ para a elección $\theta(t_1)=\lim_{t\to t_1^-}\theta(t)+\epsilon_1$; continúase inductivamente ata chegar a $[t_{k-1},t_k)$, definindo finalmente $\theta(b)=\lim_{t\to b^-}\theta(t)+\epsilon_k$.
Construímos unha función ángulo de rotación para a curva ${\alpha\colon [0,3]\to \R^2}$ dada por \[ \alpha(t)= \begin{cases} (t,t^2) & t\in [0,1],\\ (2-t,1) & t\in[1,2],\\ (0,3-t) & t\in[2,3]. \end{cases} \]
Traballamos en $\R^2$ coa estructura complexa habitual $J(x,y)=(-y,x)$.
O seguinte debuxo representa o vector tanxente unitario á curva e a función ángulo de rotación.
En primeiro lugar calculámo-lo vector tanxente unitario nos puntos de regularidade: \[ \mathbf{t}(t)= \begin{cases} \frac{(1,\,2t)}{\sqrt{1+4t^2}} & t\in(0,1),\\ (-1,0) & t\in(1,2),\\[1ex] (0,-1) & t\in(2,3). \end{cases} \]
Empezamos en $\alpha(0)$. Como $\mathbf{t}(0^+)=(1,0)$, facémo-la escolla $\theta(0)=0$. A partir de aquí tomámo-lo ángulo co eixo $x$ tendo en conta a anterior condición inicial: \[ \begin{aligned} \theta(t) &{}=\arccos \frac{1}{\sqrt{1+4t^2}}\\[1ex] &{}=\arctan(2t). \end{aligned} \] se $t\in[0,1)$.
Por facelo dun xeito un pouco máis explícito, empregámo-la fórmula que nos dá a demostración na que se calcula o ángulo de rotación para unha curva diferenciable, sendo \[ \begin{aligned} x(t) &{}=\frac{1}{\sqrt{1+4t^2}},\\ y(t) &{}=\frac{2t}{\sqrt{1+4t^2}}. \end{aligned} \] Derivando, \[ \begin{aligned} x'(t) &{}=\frac{-4t}{(1+4t^2)^{3/2}},\\ y'(t) &{}=\frac{2}{(1+4t^2)^{3/2}}. \end{aligned} \] Agora calculamos \[ \begin{aligned} \theta(t) &{}=0+\int_0^t(x(s)y'(s)-y(s)x'(s))\textup{d}\,s\\ &{}=\int_0^t\frac{2}{1+4s^2}\textup{d}\,s\\[2ex] &{}=\arctan(2t), \end{aligned} \] como xa vimos anteriormente.
No vértice $\alpha(1)$ calculamos \[ \begin{aligned} \mathbf{t}(1^-) &{}=\Bigl(\frac{1}{\sqrt{5}},\frac{2}{\sqrt{5}}\Bigr),\\ \mathbf{t}(1^+) &{}=(-1,0). \end{aligned} \] Como \[ J\mathbf{t}(1^-)= \Bigl(-\frac{2}{\sqrt{5}},\frac{1}{\sqrt{5}}\Bigr), \] a ecuación \[ \mathbf{t}(1^+) =(\cos\epsilon_1)\mathbf{t}(1^-) +(\sin\epsilon_1) J\mathbf{t}(1^-), \] tradúcese en \[ (-1,0) =(\cos\epsilon_1)\Bigl(\frac{1}{\sqrt{5}},\frac{2}{\sqrt{5}}\Bigr) +(\sin\epsilon_1)\Bigl(-\frac{2}{\sqrt{5}},\frac{1}{\sqrt{5}}\Bigr), \] de onde obtemos \[ \begin{aligned} \cos\epsilon_1 & {}=-\frac{1}{\sqrt{5}},\\ \sin\epsilon_1 & {}=\frac{2}{\sqrt{5}}. \end{aligned} \] Por tanto, tendo en conta o cadrante no que se atopa o ángulo chegamos a \[ \begin{aligned} \epsilon_1 &{}=\pi-\arccos \frac{1}{\sqrt{5}}\\ &{}=\pi-\arctan 2. \end{aligned} \]
Agora temos que definir \[ \begin{aligned} \theta(1) &{}=\lim_{t\to 1^-}\theta(t)+\epsilon_1\\ &{}=\arctan 2+\pi-\arctan 2 =\pi. \end{aligned} \]
No intervalo $(1,2)$ o vector tanxente unitario $\mathbf{t}$ é constante, así que temos \[ \theta(t)=\pi, \] para todo $t\in[1,2)$.
No vértice $\alpha(2)$ calculamos \[ \begin{aligned} \mathbf{t}(2^-) &{}=(-1,0),\\ \mathbf{t}(2^+) &{}=(0,-1). \end{aligned} \] Como $J\mathbf{t}(2^-)=(0,-1)$, a ecuación \[ \mathbf{t}(2^+) =(\cos\epsilon_2)\mathbf{t}(2^-) +(\sin\epsilon_2) J\mathbf{t}(2^-), \] tradúcese en \[ (0,-1) =(\cos\epsilon_2)(-1,0) +(\sin\epsilon_2)(0,-1), \] de onde obtemos \[ \epsilon_2=\frac{\pi}{2}. \]
A continuación \[ \begin{aligned} \theta(2) &{}=\lim_{t\to 2^-}\theta(t)+\epsilon_2\\ &{}=\pi+\frac{\pi}{2}=\frac{3\pi}{2}. \end{aligned} \]
No intervalo $(2,3)$ o vector tanxente unitario $\mathbf{t}$ é constante, así que temos \[ \theta(t)=\frac{3\pi}{2}, \] para todo $t\in[2,3)$.
Finalmente chegamos ó vértice $\alpha(3)=\alpha(0)$ onde \[ \begin{aligned} \mathbf{t}(3^-) &{}=(0,-1),\\ \mathbf{t}(3^+) &{}=\mathbf{t}(0^+)=(1,0). \end{aligned} \] Como $J\mathbf{t}(3^-)=(1,0)$, a ecuación \[ \mathbf{t}(3^+) =\mathbf{t}(0^+) =(\cos\epsilon_3)\mathbf{t}(3^-) +(\sin\epsilon_3) J\mathbf{t}(3^-), \] tradúcese en \[ (1,0) =(\cos\epsilon_3)(0,-1) +(\sin\epsilon_3)(1,0), \] de onde obtemos \[ \epsilon_3=\frac{\pi}{2}. \]
Isto lévanos á definición \[ \begin{aligned} \theta(3) &{}=\lim_{t\to 3^-}\theta(t)+\epsilon_3\\ &{}=\frac{3\pi}{2}+\frac{\pi}{2}=2\pi. \end{aligned} \]
Recopilando toda esta información, temos unha función ángulo de rotación ${\theta\colon[0,3]\to\R}$ determinada por \[ \theta(t)= \begin{cases} \arctan(2t) & t\in[0,1),\\ \pi & t\in[1,2),\\[1ex] {3\pi}/{2} & t\in[2,3),\\[1ex] 2\pi & t=3. \end{cases} \]
Outro exemplo visual do ángulo de rotación.
Na definición de ángulo de rotación, se supoñemos que ${\alpha\colon[a,b]\to\R^2}$ é unha curva pechada admisible, e ${\theta\colon[a,b]\to\R}$ é un ángulo de rotación, a definición asegura que \[ (\cos\theta(b),\sin\theta(b))=(\cos\theta(a),\sin\theta(a)), \] xa que tanto en $t=a$ como en $t=b$ se acaba calculando o ángulo que forma o mesmo vector co eixo $x$. En consecuencia, a definición seguinte ten sentido.
Sexa ${\alpha\colon[a,b]\to\R^2}$ unha curva plana, pechada, e admisible. Defínese o índice de rotación de $\alpha$ como o número enteiro \[ \rho(\alpha)=\frac{\theta(b)-\theta(a)}{2\pi}, \] sendo ${\theta\colon[a,b]\to\R}$ un ángulo de rotación de $\alpha$.
No transcurso da demostración do teorema de rotación das tanxentes necesitarase o seguinte resultado.
Sexan $p_1$, $p_2$, $p_3\in\R^2$ puntos non colineares e $\beta$ a curva de Bézier cuadrática determinada por $p_1$, $p_3$, e $p_2$, é dicir, ${\beta\colon[0,1]\to\R^2}$ definida como \[ \beta(t)=(1-t)^2p_1+2t(1-t)p_3+t^2 p_2. \] Probar que $\beta$ une $p_1$ con $p_2$, e que o seu ángulo de rotación é monótono entre os ángulos dos vectores $p_3-p_1$ e $p_2-p_3$.
En realidade o que necesitaremos é a seguinte consecuencia sinxela do exercicio anterior.
Sexan $p_1$, $p_2\in\R^2$ dous puntos distintos, e $\mathbf{v}_1$ e $\mathbf{v}_2$ dous vectores linearmente independentes. Supoñamos que $\mathbf{v}_1$ e $\mathbf{v}_2$ tamén son linearmente independentes de $p_2-p_1$. Sexa $p_3$ o punto de intersección das rectas $p_1+t\mathbf{v}_1$ e $p_2+t\mathbf{v}_2$ (tal punto é único polas condicións anteriores). Entón a curva de Bézier cuadrática determinada por $p_1$, $p_3$, e $p_2$, une $p_1$ con $p_2$ con velocidades, neses puntos, proporcionais a $\mathbf{v}_1$ e $\mathbf{v}_2$ respectivamente, e o seu ángulo de rotación en $[0,1]$ é unha función monótona.
O resultado principal para curvas planas é tamén coñecido como Hopf Umlaufsatz.
Se $\alpha$ é unha curva plana, pechada, simple, admisible, e orientada positivamente, entón o seu índice de rotación é $1$.
En primeiro lugar próbase o teorema para unha curva continuamente diferenciable, pechada, simple, ${\alpha\colon[a,b]\to\R^2}$ tal que $\alpha'(a)=\alpha'(b)$. Escribimos $\alpha(t)=(x(t),y(t))$.
Como $\alpha(a)=\alpha(b)$ podemos supoñer que $\alpha$ é unha curva periódica ${\alpha\colon\R\to\R^2}$ de periodo $b-a$. Como $\alpha'(a)=\alpha'(b)$, esta extensión periódica de $\alpha$ a $\R$ ten derivadas continuas.
Sexa ${\theta\colon\R\to\R}$ un levantamento do vector tanxente unitario ${\mathbf{t}\colon\R\to\mathbb{S}^1}$. Entón $\theta_{\vert[a,b]}$ é un ángulo de rotación para a curva orixinal $\alpha_{\vert[a,b]}$. Por tanto, $\theta(b)=\theta(a)+2\pi\rho(\alpha)$.
Definimos $\tilde{\theta}(t)=\theta(t+b-a)-2\pi\rho(\alpha)$. Entón, por periodicidade, \[ \begin{aligned} \bigl(\cos\tilde{\theta}(t),\sin\tilde{\theta}(t)\bigr) &{}=\bigl(\cos\theta(t+b-a),\, \sin\theta(t+b-a)\bigr)\\ &{}=\mathbf{t}(t+b-a)\\ &{}=\mathbf{t}(t), \end{aligned} \] para todo $t$. Por tanto, $\tilde{\theta}$ é outro levantamento de $\mathbf{t}$ e $\tilde{\theta}(a)=\theta(b)-2\pi\rho(\alpha)=\theta(a)$. Por unicidade, $\tilde{\theta}=\theta$. Isto proba que \[ \theta(t+b-a)=\theta(t)+2\pi\rho(\alpha), \] para todo $t\in\R$.
Sexa $a_0\in[a,b]$ e $b_0=a_0+b-a$. Entón, $\alpha_{\vert[a_0,b_0]}$ segue sendo unha curva plana pechada simple continuamente diferenciable con ángulo de rotación $\theta_{\vert[a_0,b_0]}$. Pola ecuación anterior, \[ \begin{aligned} \theta(b_0)-\theta(a_0) &{}=\theta(a_0+b-a)-\theta(a_0)\\ &{}=2\pi\rho(\alpha), \end{aligned} \] así que $\alpha_{[a_0,b_0]}$ ten o mesmo índice de rotación ca $\alpha_{\vert[a,b]}$. Dito doutro xeito: o índice de rotación é o mesmo para calquera intervalo de lonxitude $b-a$.
Como podemos elexir calquera intervalo de lonxitude $b-a$ para os nosos propósitos, supoñeremos de agora en diante que a coordenada $y$ de $\alpha$ alcanza o seu mínimo en $t=a$. Ademais, despois de aplicar unha traslación se fose necesario, tamén podemos supoñer que $\alpha(0)=(0,0)$. Así, por definición de mínimo, $y(t)\geq 0$ para todo $t\in\R$. Nótese ademais que $\mathbf{t}(a) = \mathbf{t}(b) = (1,0)$. Restando se fose necesario un múltiplo de $2\pi$ tamén podemos supoñer $\theta(a)=0$.
Definímo-la función ${V\colon\Delta\to\mathbb{S}^1}$, onde \[ \Delta=\{(t,s)\in\R^2:a\leq t\leq s\leq b\}, \] que vén dada por \[ V(u,v)= \begin{cases} \frac{\alpha(v)-\alpha(u)}{\lVert \alpha(v)-\alpha(u)\rVert} & u<v, (u,v)\neq(a,b),\\[1ex] \mathbf{t}(u) & u=v,\\[2ex] -\mathbf{t}(b) & (u,v)=(a,b). \end{cases} \]
A función $V$ é continua.
Sexa ${f\colon X\to\mathbb{S}^1}$ unha aplicación continua, $x_0\in X$, e $t_0\in\varepsilon^{-1}(f(x_0))$. Entón existe un único levantamento $\tilde{f}\colon X\to\R$ tal que $\varepsilon\circ\tilde{f}=f$ e $\tilde{f}(x_0)=t_0$.
Como $\Delta$ é simplemente conexo, existe un único levantamento $\varphi\colon\Delta\to\R$ de $V\colon\Delta\to\mathbb{S}^1$ tal que $\varphi(a, a)=0$. É dicir, $V(u,v)=(\cos\varphi(u,v),\sin\varphi(u,v))$. A aplicación $\varphi$ chámase a función ángulo secante de $\alpha$.
Sexa ${f\colon X\to\mathbb{S}^1}$ unha aplicación continua, $x_0\in X$, e $t_0\in\varepsilon^{-1}(f(x_0))$. Entón existe un único levantamento $\tilde{f}\colon X\to\R$ tal que $\varepsilon\circ\tilde{f}=f$ e $\tilde{f}(x_0)=t_0$.
O índice de rotación pode expresarse en termos da función ángulo secante como \[ \begin{aligned} 2\pi\rho(\alpha) &{}=\theta(b)-\theta(a)\\ &{}=\varphi(b,b)-\varphi(a,a)\\ &{}=\varphi(b,b). \end{aligned} \]
O vector $V(a,v)$, $v\in[a,b]$, está afincado na orixe e ten a punta no semiplano superior, pois $\alpha(a)=\mathbf{0}$ e $\alpha(b)$ está no semiplano superior. Como $\varphi(a,a)=0$, debemos ter $\varphi(a,v)\in[0,\pi]$ para todo $v\in[a,b]$. Como $V(a,b)=-\mathbf{t}(b)=-\mathbf{t}(a)$ ten que ser $\varphi(a,b)=\pi$.
O vector $V(u,b)$, $u\in[a,b]$, está afincado en $\alpha(u)$ e apunta cara á orixe. Se o pensamos coma un vector afincado na orixe, sempre apunta cara o semiplano inferior. Ademais, $V(a,b)=-\mathbf{t}(b)$ e $V(b,b)=\mathbf{t}(b)$, así que necesariamente $\varphi(u,b)\in[\pi,2\pi]$. Como $\varphi(b,b)$ representa o ángulo de $V(b,b)=\mathbf{t}(b)$ co eixo $x$, temos que ter $\varphi(b,b)=2\pi$. En consecuencia, $\rho(\alpha)=1$ como queriamos probar.
Supoñamos agora que estamos no caso en que $\alpha$ é unha curva admisible con vértices. Probaremos que existe unha curva continuamente diferenciable que ten o mesmo índice de rotación ca $\alpha$; tal procedemento será levado a cabo "redondeando" un vértice sen cambia-lo ángulo de rotación nunha determinada veciñanza do vértice.
Sexa $\alpha(t_i)$ un vértice, con ángulo exterior $-\pi<\epsilon_i<\pi$, $\epsilon_i\neq 0$. Por simplifica-la notación suporemos $i\neq k$, pero conceptualmente o procedemento é o mesmo se hai un vértice en $\alpha(b)$.
Tomemos $h$ tal que $0<h<(\pi-\lvert\epsilon_i\rvert)/2$. Como $\theta$ é continua pola esquerda, existe $\delta>0$ tal que \[ \begin{aligned} \lvert\theta(t)-(\theta(t_i)-\epsilon_i)\rvert < h, &{}\quad\forall t\in(t_i-\delta,t_i),\\ \lvert\theta(t)-\theta(t_i)\rvert < h, &{}\quad\forall t\in(t_i,t_i+\delta). \end{aligned} \] Como $\alpha\bigl([a,b]\setminus(t_i-\delta,t_i+\delta)\bigr)$ é compacto e $\alpha(t_i)\notin\alpha\bigl([a,b]\setminus(t_i-\delta,t_i+\delta)\bigr)$, existe ${r>0}$ tal que $\alpha(t)\in\R^2\setminus B[\alpha(t_i),r]$ para todo $t\in[a,b]\setminus(t_i-\delta, t_i+\delta)$. Tomemos $s_1\in{(t_i-\delta,t_i)}$ tal que $\alpha(s_1)\in B[\alpha(t_i),r]$, e $s_2\in(t_i,t_i+\delta)$ tal que $\alpha(s_2)\notin B(\alpha(t_i),r)$.
Vexamos que para calquera $t,s\in [s_1,s_2]$ temos $\lvert\theta(t)-\theta(s)\rvert<\pi$. Isto consiste simplemente en aplica-las desigualdades anteriores tendo en conta un pouco de casuística:
- Se $t,s\in(t_i-\delta,t_i)$ entón \[ \begin{aligned} \lvert\theta(t)-\theta(s)\rvert &{}=\lvert\theta(t)-(\theta(t_i)-\epsilon_i) -\theta(s)+(\theta(t_i)-\epsilon_i)\rvert\\ &{}\leq\lvert\theta(t)-(\theta(t_i)-\epsilon_i)\rvert +\lvert\theta(s)-(\theta(t_i)-\epsilon_i)\rvert\\ &{}<h+h <\pi-\lvert\epsilon_i\rvert <\pi. \end{aligned} \]
- Se $t,s\in(t_i,t_i+\delta)$ entón \[ \begin{aligned} \lvert\theta(t)-\theta(s)\rvert &{}=\lvert\theta(t)-\theta(t_i) -\theta(s)+\theta(t_i)\rvert\\ &{}\leq\lvert\theta(t)-\theta(t_i)\rvert +\lvert\theta(s)-\theta(t_i)\rvert\\ &{}<h+h <\pi-\lvert\epsilon_i\rvert <\pi. \end{aligned} \]
- Se $t\in(t_i-\delta,t_i)$ e $s\in(t_i,t_i+\delta)$ entón \[ \begin{aligned} \lvert\theta(t)-\theta(s)\rvert &{}=\lvert\theta(t)-(\theta(t_i)-\epsilon_i) -\theta(s)+(\theta(t_i)-\epsilon_i)\rvert\\ &{}\leq\lvert\theta(t)-(\theta(t_i)-\epsilon_i)\rvert +\lvert\theta(s)-\theta(t_i)\rvert+\lvert\epsilon_i\rvert\\ &{}<h+h+\lvert\epsilon_i\rvert <\pi-\lvert\epsilon_i\rvert+\lvert\epsilon_i\rvert =\pi. \end{aligned} \]
Unha vez fixemos esta comprobación, agora trátase de reemplazar $\alpha_{\vert[s_1,s_2]}$ por outra curva regular $\beta$ que é tanxente a $\alpha$ en $\alpha(s_1)$ e $\alpha(s_2)$, e tal que o seu ángulo varíe de xeito monótono desde $\theta(s_1)$ ata $\theta(s_2)$. Un xeito de facer isto é mediante unha curva de Bézier cuadrática. Como o ángulo de rotación desta curva é monótono, está entre $-\pi$ e $\pi$, e representa a varianción dos ángulos que forman $\alpha'(s_1)$ e $\alpha'(s_2)$ co eixo $x$, os ángulos de rotación totais de $\beta$ e $\alpha_{[s_1,s_2]}$ teñen que se-los mesmos. Así, obtivemos unha curva co mesmo índice de rotación ca $\alpha$, pero cun vértice menos.
Repetindo este procedemento para tódolos posibles vértices obtémo-lo resultado que queriamos probar.
Índice de rotación nunha superficie
A continuación queremos obte-lo análogo ó Teorema de rotación dos tanxentes nunha superficie. No que segue suporemos que $S$ é un superficie orientada, e denotaremos por $J$ a súa estructura complexa.
En primeiro lugar, o ángulo exterior nun vértice dunha curva admisible non presenta ningunha dificultade con respecto do caso plano.
Sexa ${\alpha\colon[a,b]\to S}$ unha curva admisible con respecto da partición $a=t_0<t_1<\dots<t_k=b$. Supoñamos que no vértice $\alpha(t_i)$ se ten $\mathbf{t}(t_i^-)\neq\pm\mathbf{t}(t_i^+)$. Defínese o ángulo exterior no vértice $\alpha(t_i)$, $i\in\{1,\dots,k\}$, como o ángulo orientado de $\mathbf{t}(t_i^-)$ a $\mathbf{t}(t_i^+)$. Por tanto, vén determinado polo número $\epsilon_i\in(-\pi,\pi)$ tal que \[ \mathbf{t}(t_i^+)= \bigl(\cos\epsilon_i\bigr)\mathbf{t}(t_i^-) +\bigl(\sin\epsilon_i\bigr)J\mathbf{t}(t_i^-), \] sendo $J$ a estructura complexa de $S$ con respecto da orientación elexida.
O ángulo interior defínese como $\varphi_i=\pi-\epsilon_i$.
Igual ca no caso plano, se a curva é pechada, farémo-lo pequeno abuso de notación $\alpha'(t_k^+)=\alpha'(b^+)\equiv\alpha'(a^+)=\alpha'(t_0^+)$ para defini-lo ángulo exterior (e interior) no vértice $\alpha(a)=\alpha(b)$.
Para defini-lo índice de rotación as cousas non son tan sinxelas e necesitamos primeiro especificármo-las curvas ás que lles vai aplicar este concepto.
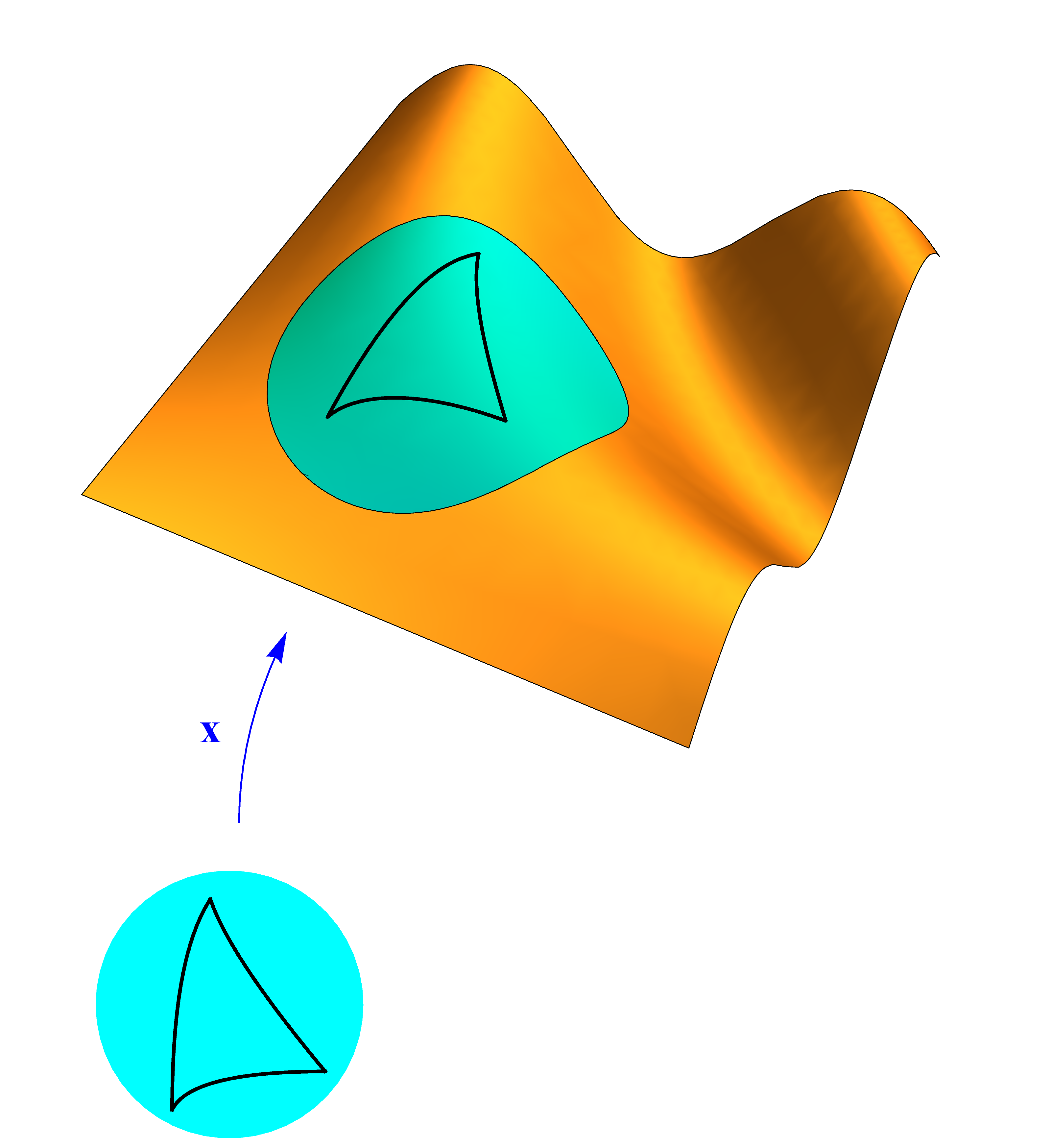
Sexa $U$ unha bóla de $\R^2$, e ${\mathbf{x}\colon U\to\mathbf{x}(U)\subset S}$ unha parametrización positivamente orientada. Sexa ${\sigma\colon[a,b]\to U}$ unha curva pechada simple admisible na partición $a=t_0<t_1<\dots<t_k=b$ que encerra unha rexión interior $\Omega$ tal que $\overline{\Omega}\subset U$. Sexa $R=\mathbf{x}(\Omega)$, que supoñemos que é un subconxunto relativamente compacto de $S$. Entón $\alpha={\mathbf{x}\circ\sigma\colon[a,b]\to S}$ é unha curva pechada admisible en $S$ na mesma partición $a=t_0<t_1<\dots<t_k=b$. Diremos que $R$ é o interior de $\alpha$. Se $\sigma$ está positivamente orientada (no sentido explicado anteriormente para curvas planas), diremos que $\alpha$ tamén está positivamente orientada. Ademais suporemos que nos vértices $\alpha(t_i)$ se satisfai que $\mathbf{t}(t_i^-)\neq\pm\mathbf{t}(t_i^+)$. Nestas condicións diremos que ${\alpha\colon[a,b]\to S}$ é polígono curvado da superficie $S$.
Sexa $(E_1,E_2)$ a base ortonormal de campos de vectores tanxentes obtida ó aplica-lo algoritmo de Gram-Schmidt á base de campos coordenados $(\mathbf{x}_1,\mathbf{x}_2)$. Específicamente isto é \[ \begin{aligned} E_1 &{}=\frac{\mathbf{x}_1}{\lVert\mathbf{x}_1\rVert},\\ E_2 &{}=\frac{\mathbf{x}_2-\langle\mathbf{x}_2,E_1\rangle E_1} {\lVert\mathbf{x}_2-\langle\mathbf{x}_2,E_1\rangle E_1\rVert}. \end{aligned} \] Nótese que o algoritmo de Gram-Schmidt dá unha base ortonormal positivamente orientada, así que tamén temos $JE_1=E_2$.
Defínese unha función ángulo de rotación para a curva $\alpha$ como unha función continua a trozos ${\theta\colon[a,b]\to\R}$ que satisfai \[ \mathbf{t}(t)=\cos\theta(t)E_1(\alpha(t))+\sin\theta(t)E_2(\alpha(t)), \] en cada intervalo $(t_{i-1},t_i)$, e que é continua pola dereita en cada $t_i$ con \[ \theta(t_i)=\lim_{t\to t_i^-}\theta(t)+\epsilon_i, \] sendo $\epsilon_i$ o ángulo exterior en $\alpha(t_i)$, e $i\in\{1,\dots,k\}$. A existencia dunha función tal séguese de xeito similar ó caso plano, tendo en conta que podemos escribir \[ \mathbf{t}(t)=u_1(t)E_1(\alpha(t))+u_2(t)E_2(\alpha(t)), \] para un par de funcións continuas $u_1,{u_2\colon[a,b]\to\R}$ tales que $u_1^2+u_2^2=1$, xa que $\mathbf{t}$ é unitario.
Igual ca no caso plano, $\theta(b)-\theta(a)$ é un múltiplo enteiro de $2\pi$, así que definímo-lo índice de rotación de $\alpha$ como o número enteiro \[ \rho(\alpha)=\frac{\theta(b)-\theta(a)}{2\pi}. \]
O problema da anterior definición é que involucra a parametrización ${\mathbf{x}\colon U\to S}$, e por tanto, esta definición pode depender da mesma. Como sempre sucede en xeometría diferencial, debemos probar que a definición non depende do sistema de coordenadas elexido.
Antes de proceder, necesitamos un resultado mencionado no tema de orientación.
Sexan $V$ e $\tilde{V}$ espacios vectoriais orientados de dimensión $2$, e ${L\colon V\to \tilde{V}}$ un isomorfismo linear que preserva a orientación. Sexa $(e_1,e_2)$ unha base ortonormal positivamente orientada de $V$. Consideremos \[ \tilde{e}_1=\frac{L(e_1)}{\lVert L(e_1)\rVert}, \] e $\tilde{e}_2$ o único vector unitario de $\tilde{V}$ que é ortogonal a $\tilde{e}_1$ e que fai de $(\tilde{e}_1,\tilde{e}_2)$ unha base ortonormal positivamente orientada de $\tilde{V}$. Poñamos $v=ae_1+be_2\neq 0$ e $L(v)=\tilde{a}\tilde{e}_1+\tilde{b}\tilde{e}_2$. Entón, se $(\tilde{a},\tilde{b})=\lambda(a,b)$ con $\lambda\in\R$, temos $\lambda> 0$.
A continuación probamos a versión do teorema do índice de rotación total para superficies.
Nunha superficie regular orientada o índice de rotación dun polígono curvado orientado positivamente é $1$.
Asumímo-las notacións que vimos manexando nesta sección. Polo Teorema de rotación dos tanxentes, a curva $\sigma$ ten índice de rotación $\rho(\sigma)=1$. Por tanto, chega con probar que $\rho(\alpha)=\rho(\sigma)$.
Pola contra supoñamos que $\rho(\alpha)\neq\rho(\sigma)$. Denotemos por $\tilde{\theta}$ o ángulo de rotación de $\sigma$ como curva plana contida en $U\subset\R^2$, e sexa $\theta$ o ángulo de rotación de $\alpha$ tal e como foi definido arriba. Considerámo-la función ${f\colon[a,b]\to\R}$, $t\mapsto f(t)=\theta(t)-\tilde{\theta}(t)$. Como os índices de rotación son enteiros distintos temos \[ \begin{aligned} 2\pi &{}\leq 2\pi\lvert\rho(\alpha)-\rho(\sigma)\lvert\\ &{}=\lvert (\theta(b)-\theta(a))-(\tilde{\theta}(b)-\tilde{\theta}(a)) \rvert\\ &{}=\lvert f(b)-f(a)\rvert. \end{aligned} \] En vista desta desigualdade, polo Teorema de Bolzano, existe $t_0\in[a,b]$ tal que $f(t_0)$ é un múltiplo enteiro impar de $\pi$. Isto implica \[ (\cos\theta(t_0),\sin\theta(t_0)) =-(\cos\tilde{\theta}(t_0),\sin\tilde{\theta}(t_0)). \]
Agora aplicámo-la observación anterior para a aplicación ${d\mathbf{x}_{\sigma(t_0)}\colon\R^2\to T_{\sigma(t_0)}S}$. Tomamos \[ \begin{aligned} v &{}=\sigma'(t_0)\\ &{}=\lVert\sigma'(t_0)\rVert_u (\cos\tilde{\theta}(t_0)e_1+\sin\tilde{\theta}(t_0)e_2), \end{aligned} \] sendo $\lVert\,\cdot\,\rVert_u$ a norma euclidiana de $\R^2$ e $(e_1,e_2)$ a base canónica positivamente orientada. Por outro lado, \[ \begin{aligned} d\mathbf{x}_{\sigma(t_0)}(v) &{}=\alpha'(t_0)\\ &{}=\lVert\alpha'(t_0)\rVert\mathbf{t}(t_0)\\ &{}=\lVert\alpha'(t_0)\rVert (\cos\theta(t_0)E_1(\alpha(t))+\sin\theta(t_0)E_2(\alpha(t))), \end{aligned} \] onde a base $(E_1,E_2)$ está definida de acordo coa fórmula da observación mencionada.
Pois ben, denotando $a=\lVert\sigma'(t_0)\rVert_u \cos\tilde{\theta}(t_0)$, $b=\lVert\sigma'(t_0)\rVert_u \sin\tilde{\theta}(t_0)$, $\tilde{a}=\lVert\alpha'(t_0)\rVert \cos{\theta}(t_0)$, e $\tilde{b}=\lVert\alpha'(t_0)\rVert \sin{\theta}(t_0)$, a ecuación obtida anteriormente implica \[ \begin{aligned} (\tilde{a},\tilde{b}) &{}=\lVert\alpha'(t_0)\rVert (\cos{\theta}(t_0),\sin\theta(t_0))\\ &{}=-\lVert\alpha'(t_0)\rVert (\cos\tilde{\theta}(t_0),\sin\tilde{\theta}(t_0))\\ &{}=-\frac{\lVert\alpha'(t_0)\rVert}{\lVert\sigma'(t_0)\rVert_u}(a,b), \end{aligned} \] o que está en contra do que di a observación, xa que $\mathbf{x}$ é unha parametrización positivamente orientada.
Dado que a definición de ángulo de rotación nunha superficie involucra aplicarlle o algoritmo de Gram-Schmidt ós vectores coordenados dunha parametrización, resultará convinte, para a demostración do Teorema de Gauss-Bonnet local, relaciona-la curvatura xeodésica e a curvatura de Gauss coa base ortonormal obtida mediante este algoritmo.
Sexa $S$ unha superficie orientada. Sexa ${\mathbf{x}\colon U\subset\R^2\to S}$ unha parametrización ortogonal de $S$ positivamente orientada. Sexa $(E_1,E_2)$ unha base ortonormal positivamente orientada de campos de vectores tanxentes na veciñanza coordenada $\mathbf{x}(U)$. Sexa ${\alpha\colon I\to\mathbf{x}(U)}$ unha curva regular parametrizada por arco con ángulo de rotación $\theta$. Entón \[ \kappa_g[\alpha](s)= \theta'(s)+\langle (E_1\circ \alpha)'(s),(E_2\circ\alpha)(s)\rangle. \]
Como $(E_1,E_2)$ é unha base ortonormal positivamente orientada temos $JE_1=E_2$, $JE_2=-E_1$.
Recordemos que o ángulo de rotación $\theta$ vén definido pola ecuación \[ \alpha'(s)= \bigl(\cos\theta(s)\bigr)E_1(\alpha(s)) +\bigl(\sin\theta(s)\bigr)E_2(\alpha(s)). \]
Por un lado temos \[ J\alpha'=-(\sin\theta)(E_1\circ\alpha)+(\cos\theta)(E_2\circ\alpha). \] Por outro lado, utilizando as propiedades da derivada covariante, \[ \begin{aligned} \frac{D\alpha'}{ds}={} &{}-\theta'\sin\theta\,(E_1\circ\alpha) +\cos\theta\,\frac{D(E_1\circ\alpha)}{ds}\\ &{}+\theta'\cos\theta\,(E_2\circ\alpha) +\sin\theta\,\frac{D(E_2\circ\alpha)}{ds}. \end{aligned} \] Xa que $\langle E_1,E_1\rangle=1$, ó derivar \[ 0=\frac{d}{ds}\langle E_1\circ\alpha,E_1\circ\alpha\rangle =2\Bigl\langle\frac{D(E_1\circ\alpha)}{ds},E_1\circ\alpha\Bigr\rangle. \] Por tanto, tendo en conta isto, e que $E_2$ é tanxente, \[ \begin{aligned} \frac{D(E_1\circ\alpha)}{ds}={} &{}\Bigl\langle\frac{D(E_1\circ\alpha)}{ds},E_1\circ\alpha\Bigr\rangle E_1\circ\alpha\\ &{}+\Bigl\langle\frac{D(E_1\circ\alpha)}{ds},E_2\circ\alpha\Bigr\rangle E_2\circ\alpha\\[1ex] {}={}&{}\langle (E_1\circ\alpha)',E_2\circ\alpha\rangle E_2\circ\alpha. \end{aligned} \] De xeito similar, \[ \frac{D(E_2\circ\alpha)}{ds} =\langle (E_2\circ\alpha)',E_1\circ\alpha\rangle E_1\circ\alpha, \] pero como $\langle E_1,E_2\rangle=0$, derivando \[ \begin{aligned} 0 &{}=\frac{d}{ds}\langle E_1\circ\alpha,E_2\circ\alpha\rangle\\ &{}=\langle (E_1\circ\alpha)',E_2\circ\alpha\rangle +\langle E_1\circ\alpha,(E_2\circ\alpha)'\rangle, \end{aligned} \] de onde, \[ \frac{D(E_2\circ\alpha)}{ds} =-\langle (E_1\circ\alpha)',E_2\circ\alpha\rangle E_1\circ\alpha. \] Subsituíndo na expresión de arriba obtemos \[ \frac{D\alpha'}{ds} =\bigl(\theta'+\langle (E_1\circ\alpha)',(E_2\circ\alpha)\rangle\bigr) \bigl(-(\sin\theta)(E_1\circ\alpha)+(\cos\theta)(E_2\circ\alpha)\bigr), \]
En consecuencia, \[ \begin{aligned} \kappa_g[\alpha] &{}=\Bigl\langle \frac{D\alpha'}{ds},J\alpha'\Bigr\rangle\\ &{}=\theta'+\langle (E_1\circ\alpha)',(E_2\circ\alpha)\rangle. \end{aligned} \] que é o que queriamos probar.
Sexa $S$ unha superficie orientada. Sexa ${\mathbf{x}\colon U\subset\R^2\to S}$ unha parametrización ortogonal de $S$ positivamente orientada. Sexa $(E_1,E_2)$ unha base ortonormal positivamente orientada de campos de vectores tanxentes na veciñanza coordenada $\mathbf{x}(U)$. Entón \[ K\circ\mathbf{x} =\frac{1}{\lVert\mathbf{x}_1\times\mathbf{x}_2\lVert} \Bigl( \Bigl\langle \frac{\partial (E_1\circ\mathbf{x})}{\partial u_1}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_2}\Bigr\rangle -\Bigl\langle \frac{\partial (E_1\circ\mathbf{x})}{\partial u_2}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_1}\Bigr\rangle \Bigr). \]
Sexa $A=(a_{i}^{j})$ a matriz de cambio de base de $(\mathbf{x}_1,\mathbf{x}_2)$ a $(E_1,E_2)$, é dicir, $E_i\circ\mathbf{x}=\sum_j a_{i}^{j}\mathbf{x}_j$, ou matricialmente, \[ \begin{pmatrix} E_1\circ\mathbf{x} & E_2\circ\mathbf{x} \end{pmatrix}= \begin{pmatrix} \mathbf{x}_1 & \mathbf{x}_2 \end{pmatrix} \begin{pmatrix} a_{1}^{1} & a_{2}^{1}\\ a_{1}^{2} & a_{2}^{2} \end{pmatrix}. \]
Recordémo-la relación entre o producto vectorial de vectores dun plano no espacio cando facemos un cambio de base: \[ \begin{aligned} 1 &{}=\lVert (E_1\circ\mathbf{x})\times (E_2\circ\mathbf{x})\rVert\\ &{}=\lvert\det A\rvert\lVert\mathbf{x}_1\times\mathbf{x}_2\rVert\\ &{}=(\det A)\lVert\mathbf{x}_1\times\mathbf{x}_2\rVert, \end{aligned} \] xa que as dúas bases teñen a mesma orientación. Por tanto, \[ \det A=\frac{1}{\lVert\mathbf{x}_1\times\mathbf{x}_2\rVert}. \]
Sexa $\mathbf{N}$ o vector normal unitario á superficie determinado pola orientación positiva escollida. A continuación expresámo-la diferencial da aplicación de Gauss (que coincide con $\mathbf{N}\circ\mathbf{x}$ na veciñanza $\mathbf{x}(U)$) en termos da base $(E_1,E_2)$: \[ \begin{aligned} K\circ\mathbf{x} &{}=\det d(\mathbf{N}\circ\mathbf{x})\\ &{}=\det \begin{pmatrix} \langle d\mathbf{N}(E_1\circ\mathbf{x}),E_1\circ\mathbf{x}\rangle & \langle d\mathbf{N}(E_2\circ\mathbf{x}),E_1\circ\mathbf{x}\rangle\\ \langle d\mathbf{N}(E_1\circ\mathbf{x}),E_2\circ\mathbf{x}\rangle & \langle d\mathbf{N}(E_2\circ\mathbf{x}),E_2\circ\mathbf{x}\rangle \end{pmatrix}\\ &{}=\det \begin{pmatrix} \langle d\mathbf{N}(a_1^1\mathbf{x}_1+a_1^2\mathbf{x}_2), E_1\circ\mathbf{x}\rangle & \langle d\mathbf{N}(a_2^1\mathbf{x}_1+a_2^2\mathbf{x}_2), E_1\circ\mathbf{x}\rangle\\ \langle d\mathbf{N}(a_1^1\mathbf{x}_1+a_1^2\mathbf{x}_2), E_2\circ\mathbf{x}\rangle & \langle d\mathbf{N}(a_2^1\mathbf{x}_1+a_2^2\mathbf{x}_2), E_2\circ\mathbf{x}\rangle \end{pmatrix}\\ &{}=\det\left( \begin{pmatrix} \langle d\mathbf{N}(\mathbf{x}_1),E_1\circ\mathbf{x}\rangle & \langle d\mathbf{N}(\mathbf{x}_2),E_1\circ\mathbf{x}\rangle\\ \langle d\mathbf{N}(\mathbf{x}_1),E_2\circ\mathbf{x}\rangle & \langle d\mathbf{N}(\mathbf{x}_2),E_2\circ\mathbf{x}\rangle \end{pmatrix} \begin{pmatrix} a_1^1 & a_2^1\\ a_1^2 & a_2^2 \end{pmatrix} \right)\\ &{}=(\det A) \det\begin{pmatrix} \langle \frac{\partial (\mathbf{N}\circ\mathbf{x})}{\partial u_1}, E_1\circ\mathbf{x}\rangle & \langle\frac{\partial (\mathbf{N}\circ\mathbf{x})}{\partial u_2}, E_1\circ\mathbf{x}\rangle\\ \langle \frac{\partial (\mathbf{N}\circ\mathbf{x})}{\partial u_1}, E_2\circ\mathbf{x}\rangle & \langle \frac{\partial (\mathbf{N}\circ\mathbf{x})}{\partial u_2}, E_2\circ\mathbf{x}\rangle \end{pmatrix}. \end{aligned} \]
Como $\langle \mathbf{N},E_i\rangle=0$, derivando temos \[ \begin{aligned} 0 &{} =\frac{\partial}{\partial u_j} \langle \mathbf{N}\circ\mathbf{x},E_i\circ\mathbf{x}\rangle\\ &{} =\Bigl\langle\frac{\partial (\mathbf{N}\circ\mathbf{x})}{\partial u_j}, E_i\circ\mathbf{x}\Bigr\rangle +\Bigl\langle\mathbf{N}\circ\mathbf{x}, \frac{\partial(E_i\circ\mathbf{x})}{\partial u_j}\Bigr\rangle, \end{aligned} \] de xeito que, substituíndo na anterior expresión obtemos \[ \begin{aligned} K\circ\mathbf{x} =\frac{1}{\lVert\mathbf{x}_1\times\mathbf{x}_2\rVert} \Bigl( &{}\Bigl\langle\mathbf{N}\circ\mathbf{x}, \frac{(E_1\circ\mathbf{x})}{\partial u_1}\Bigr\rangle \Bigl\langle\mathbf{N}\circ\mathbf{x}, \frac{(E_2\circ\mathbf{x})}{\partial u_2}\Bigr\rangle\\ &{}-\Bigl\langle\mathbf{N}\circ\mathbf{x}, \frac{(E_1\circ\mathbf{x})}{\partial u_2}\Bigr\rangle \Bigl\langle\mathbf{N}\circ\mathbf{x}, \frac{(E_2\circ\mathbf{x})}{\partial u_1}\Bigr\rangle \Bigr). \end{aligned} \]
Para rematar observemos que $\langle E_i,E_i\rangle=1$, co que derivando obtemos \[ \Bigl\langle\frac{\partial(E_i\circ\mathbf{x})}{\partial u_j}, E_i\circ\mathbf{x}\Bigr\rangle=0. \] Tendo en conta que $(E_1,E_2,\mathbf{N})$ é unha base de $\R^3$, a anterior expresión dános \[ \begin{aligned} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, \frac{\partial(E_2\circ\mathbf{x})}{\partial u_2}\Bigr\rangle={} &{} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, E_1\circ\mathbf{x}\Bigr\rangle \Bigl\langle\frac{\partial(E_2\circ\mathbf{x})}{\partial u_2}, E_1\circ\mathbf{x}\Bigr\rangle\\ &{} +\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, E_2\circ\mathbf{x}\Bigr\rangle \Bigl\langle\frac{\partial(E_2\circ\mathbf{x})}{\partial u_2}, E_2\circ\mathbf{x}\Bigr\rangle\\ &{} +\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle \Bigl\langle\frac{\partial(E_2\circ\mathbf{x})}{\partial u_2}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle\\ {}={}&{} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle \Bigl\langle\frac{\partial(E_2\circ\mathbf{x})}{\partial u_2}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle. \end{aligned} \]
De xeito análogo tamén temos \[ \begin{aligned} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, \frac{\partial(E_2\circ\mathbf{x})}{\partial u_1}\Bigr\rangle={} {}={}&{} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle \Bigl\langle\frac{\partial(E_2\circ\mathbf{x})}{\partial u_1}, \mathbf{N}\circ\mathbf{x}\Bigr\rangle. \end{aligned} \]
Combinando estas expresións co obtido anteriormente para $K\circ\mathbf{x}$ obtémo-lo resultado.
Coordenadas ortogonais
O seguinte preparativo que necesitamos para a demostración do teorema de Gauss-Bonnet é obter algúns resultados para parametrizacións ortogonais. Nótese que existen coordenadas ortogonais arredor de cada punto da superficie.
Sexan ${\mathbf{x}\colon U\to S}$ coordenadas ortogonais, é dicir, $g_{12}=0$. Entón, témo-los símbolos de Christoffel:
Os símbolos de Christoffel nunha parametrización ortogonal son: \[ \begin{aligned} \Gamma_{11}^1 &{}=\frac{1}{2g_{11}}\frac{\partial g_{11}}{\partial u_1},\\ \Gamma_{11}^2 &{}=-\frac{1}{2g_{22}}\frac{\partial g_{11}}{\partial u_2},\\ \Gamma_{12}^1 &{}=\Gamma_{21}^1 =\frac{1}{2g_{11}}\frac{\partial g_{11}}{\partial u_2},\\ \Gamma_{12}^2 &{}=\Gamma_{21}^2 =\frac{1}{2g_{22}}\frac{\partial g_{22}}{\partial u_1},\\ \Gamma_{22}^1 &{}=-\frac{1}{2g_{11}}\frac{\partial g_{22}}{\partial u_1},\\ \Gamma_{22}^2 &{}=\frac{1}{2g_{22}}\frac{\partial g_{22}}{\partial u_2}. \end{aligned} \]
A partir de agora supoñemos que $S$ é unha superficie orientada, e que ${\mathbf{x}\colon U\subset\R^2\to S}$ é unha parametrización ortogonal orientada positivamente.
Sexa $S$ unha superficie orientada. Sexa ${\mathbf{x}\colon U\subset\R^2\to S}$ unha parametrización ortogonal de $S$ positivamente orientada. Sexa ${\alpha\colon I\to\mathbf{x}(U)}$ unha curva regular parametrizada por arco con ángulo de rotación $\theta$. Poñamos $\alpha(s)=\mathbf{x}(u_1(s),u_2(s))$. Entón \[ \kappa_g[\alpha]=\theta'+\frac{1}{2\sqrt{g_{11}g_{22}}}\Bigl( -u_1'\frac{\partial g_{11}}{\partial u_2} +u_2'\frac{\partial g_{22}}{\partial u_1} \Bigr). \]
Definimos \[ \begin{aligned} E_1(s) &{}=\frac{\mathbf{x}_1(u(s))}{\lVert\mathbf{x}_1(u(s))\rVert},\\ E_2(s) &{}=\frac{\mathbf{x}_2(u(s))}{\lVert\mathbf{x}_2(u(s))\rVert}. \end{aligned} \] Entón $(E_1,E_2)$ é unha base ortonormal positivamente orientada ó longo de $\alpha$. En particular, $JE_1=E_2$, $JE_2=-E_1$.
O ángulo de rotación $\theta$ vén definido pola ecuación \[ \alpha'(s)= \bigl(\cos\theta(s)\bigr)E_1(s) +\bigl(\sin\theta(s)\bigr)E_2(s). \]
Por un lado temos \[ J\alpha'=-(\sin\theta)E_1+(\cos\theta)E_2. \] Por outro lado, \[ \frac{D\alpha'}{ds} =\bigl(\theta'+\langle E_1',E_2\rangle\bigr) \bigl(-(\sin\theta)E_1+(\cos\theta)E_2\bigr). \] En consecuencia, \[ \begin{aligned} \kappa_g[\alpha] &{}=\Bigl\langle \frac{D\alpha'}{ds},J\alpha'\Bigr\rangle\\ &{}=\theta'+\langle E_1',E_2\rangle. \end{aligned} \]
Finalmente, tendo en conta a expresión para os símbolos de Christoffel nunha parametrización ortogonal, obtemos \[ \langle E_1',E_2\rangle =\frac{1}{2\sqrt{g_{11}g_{22}}}\Bigl( -u_1'\frac{\partial g_{11}}{\partial u_2} +u_2'\frac{\partial g_{22}}{\partial u_1} \Bigr), \] de onde se deduce o resultado.
Tamén necesitarémo-la seguinte fórmula, que se proba simplemente empregando a ecuación de Gauss e os símbolos de Christoffel calculadas anteriormente.
Sexa ${\mathbf{x}\colon U\subset\R^2\to S}$ unha parametrización ortogonal de $S$ positivamente orientada. Entón \[ K=-\frac{1}{2\sqrt{g_{11}g_{22}}}\biggl( \frac{\partial}{\partial u_1}\Bigl( \frac{1}{\sqrt{g_{11}g_{22}}}\frac{\partial g_{22}}{\partial u_1} \Bigr) +\frac{\partial}{\partial u_2}\Bigl( \frac{1}{\sqrt{g_{11}g_{22}}}\frac{\partial g_{11}}{\partial u_2} \Bigr) \biggr). \]
Teorema de Gauss-Bonnet local
Recordemos que a integral de liña de ${f\colon I\to \R}$ ó longo da curva ${\alpha\colon I\to \R^n}$ se define como \[ \int_\alpha f=\int_I f(t)\lVert\alpha'(t)\rVert\,\textup{d}t. \]
A integral de superficie dunha función ${f\colon U\to S}$ ó longo (da parametrización ${\mathbf{x}\colon U\subset\R^2\to S}$) dunha superficie $S$ defínese como \[ \int_S f=\int_{U} f(u,v)\lVert\mathbf{x}_u(u,v)\times\mathbf{x}_v(u,v)\rVert\, \textup{d}u\,\textup{d}v. \]
Recordamos tamén un dos teoremas básicos do cálculo vectorial.
Sexa $R$ unha rexión de $\R^2$ e supoñamos que ${\alpha \colon I\to\partial R}$ parametriza (a trozos) a fronteira $\partial R$ con coordenadas $\alpha(t)=(x(t),y(t))$. Se ${P,Q\colon R\to\R}$ son funcións diferenciables, entón \[ \int_{\partial R} P\,\textup{d}x+Q\,\textup{d}y =\int_R \Bigl(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\Bigr) \,\textup{d}x\,\textup{d}y. \]
Escrito de xeito máis explícito: \[ \int_I \bigl(P(\alpha(t))x'(t)+Q(\alpha(t))y'(t)\bigr)\textup{d}t =\int_R \Bigl(\frac{\partial Q}{\partial x}(x,y) -\frac{\partial P}{\partial y}(x,y)\Bigr) \,\textup{d}x\,\textup{d}y. \]
Podemos agora proba-la primeira versión do teorema de Gauss-Bonnet.
Sexa $S$ unha superficie regular orientada e ${\mathbf{x}\colon U\subset\R^2\to S}$ unha parametrización, con $U$ unha bóla de $\R^2$. Sexa ${\alpha\colon[a,b]\to \mathbf{x}(U)}$ un polígono curvado que encerra unha rexión interior $R\subset\mathbf{x}(U)$. Supoñemos que $\alpha$ está positivamente orientada e parametrizada por arco a trozos con respecto da partición $a=s_0< s_1<\dots < s_k=b$. Sexan $\epsilon_1,\dots,\epsilon_k$ os ángulos exteriores nos vértices $\alpha(s_1),\dots,\alpha(s_k)$. Entón, \[ \int_R K+\int_{\partial R}\kappa_g+\sum_{i=1}^k\epsilon_i=2\pi. \]
Escribamos $\alpha(s)=\mathbf{x}(u(s))$ con $u(s)=(u_1(s),u_2(s))$. Sexa $(E_1,E_2)$ a base de campos de vectores tanxentes obtida ó aplica-lo algoritmo de Gram-Schmidt á base de campos coordenados. Denotamos por $\theta$ a función ángulo de rotación de $\alpha$ con respecto desta base.
Empregando a fórmula para a curvatura xeodésica en coordenadas ortogonais, obtemos, nos puntos de regularidade de $\alpha$, \[ \kappa_g =\theta'+\langle(E_1\circ\alpha)',E_2\circ\alpha\rangle. \]
Integrando, e utilizando o teorema de rotación das tanxentes temos \[ \begin{aligned} \int_{\partial R}\kappa_g={} &{}\sum_{i=1}^k\int_{s_{i-1}}^{s_i} \kappa_g(s)\lVert\alpha'(s)\rVert\,\textup{d}s\\ {}={}&{}\sum_{i=1}^k\bigl(\theta(s_i)-\theta(s_{i-1})\bigr) +\sum_{i=1}^k\int_{s_{i-1}}^{s_i} \langle(E_1\circ\alpha)'(s),(E_2\circ\alpha)(s)\rangle\,\textup{d}s\\ {}={}&{}2\pi-\sum_{i=1}^k\epsilon_i +\sum_{i=1}^k\int_{s_{i-1}}^{s_i} \langle(E_1\circ\alpha)'(s),(E_2\circ\alpha)(s)\rangle\,\textup{d}s \end{aligned} \]
Para o último sumando aplicamos primeiro a regra da cadea, \[ \begin{aligned} (E_1\circ\alpha)'(s)={} &{}(E_1\circ\mathbf{x}\circ u)'(s)\\ {}={}&{} \frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}(u(s))\,u_1'(s) +\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}(u(s))\,u_2'(s), \end{aligned} \] co que (acurtando a notación), \[ \begin{aligned} \langle(E_1\circ\alpha)',E_2\circ\alpha\rangle={} &{} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}\circ u, E_2\circ\mathbf{x}\circ u\Bigr\rangle\,u_1'\\ &{}+\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}\circ u, E_2\circ\mathbf{x}\circ u\Bigr\rangle\,u_2'. \end{aligned} \] Así, ten sentido definir \[ \begin{aligned} P &{}= \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, E_2\circ\mathbf{x}\Bigr\rangle,\\ Q &{}= \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, E_2\circ\mathbf{x}\Bigr\rangle. \end{aligned} \]
Aplicámo-lo teorema de Green e substituímos: \[ \begin{aligned} \sum_{i=1}^k\int_{s_{i-1}}^{s_i} \langle(E_1\circ\alpha)',E_2\circ\alpha\rangle={} &{}\sum_{i=1}^k\int_{s_{i-1}}^{s_i} \bigl(P(u(s))\,u_1'(s)+Q(u(s))\,u_2'(s)\bigr)\,\textup{d}s\\ {}={}&{}\int_{\partial\, \mathbf{x}^{-1}(R)} P\,\textup{d}u_1+Q\,\textup{d}u_2'\\ {}={}&{}\int_{\mathbf{x}^{-1}(R)}\left( \frac{\partial Q}{\partial u_1} -\frac{\partial P}{\partial u_2} \right). \end{aligned} \] Agora calculámo-lo integrando e relacionámolo coa fórmula da curvatura cunha base ortonormal: \[ \begin{aligned} \frac{\partial Q}{\partial u_1} -\frac{\partial P}{\partial u_2}={} &{}\frac{\partial}{\partial u_1} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, E_2\circ\mathbf{x}\Bigr\rangle -\frac{\partial}{\partial u_2} \Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, E_2\circ\mathbf{x}\Bigr\rangle,\\ {}={} &{} \Bigl\langle\frac{\partial^2(E_1\circ\mathbf{x})}{\partial u_1\partial u_2}, E_2\circ\mathbf{x}\Bigr\rangle +\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_1}\Bigr\rangle\\ &{} -\Bigl\langle\frac{\partial^2(E_1\circ\mathbf{x})}{\partial u_1\partial u_2}, E_2\circ\mathbf{x}\Bigr\rangle -\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_2}\Bigr\rangle,\\ &{} +\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_2}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_1}\Bigr\rangle -\Bigl\langle\frac{\partial(E_1\circ\mathbf{x})}{\partial u_1}, \frac{\partial (E_2\circ\mathbf{x})}{\partial u_2}\Bigr\rangle\\[1ex] {}={}&{}(K\circ\mathbf{x}) \lVert\mathbf{x}_1\times\mathbf{x}_2\rVert. \end{aligned} \]
Substituímos na expresión anterior: \[ \begin{aligned} \sum_{i=1}^k\int_{s_{i-1}}^{s_i} \langle(E_1\circ\alpha)',E_2\circ\alpha\rangle={} &{}\int_{\mathbf{x}^{-1}(R)}(K\circ\mathbf{x}) \lVert\mathbf{x}_1\times\mathbf{x}_2\rVert\\ {}={}&{}\int_{R}K. \end{aligned} \]
Combinando isto co resultado obtido para a integral da curvatura xeodésica obtémo-lo resultado.
Teorema de Gauss-Bonnet global
Sexa $S$ unha supeficie regular orientada.
Para enuncia-lo teorema de Gauss-Bonnet necesitaremos varios preparativos topolóxicos. Introducirémo-las definicións, pero varios dos enunciados non os probaremos neste curso.
Recordemos que unha rexión $R\subset S$ é un conxunto aberto conexo, relativamente compacto de $S$ tal que $\partial R$ é unión dunha cantidade finita de compoñentes conexas cada unha das cales é homeomorfa a $\mathbb{S}^1$, e que pode ser parametrizada regularmente a trozos.
Un triángulo (curvado) de $S$ é un polígono curvado con exactamente tres vértices, é dicir, unha curva pechada simple regular a trozos ${\alpha\colon[a,b]\to S}$ na partición $a=t_0<t_1<t_2<t_3=b$, que está contida nunha veciñanza coordenada $\mathbf{x}(U)$ sendo $U$ unha bóla de $\R^2$. Cada segmento $\alpha_{\vert[t_i,t_{i+1}]}$ chámase arista.
Unha triangulación dunha rexión $R$ é unha familia $\mathcal{T}=\{T_1,\dots,T_k\}$ de rexións contidas en $R$ tal que:
- O borde $\partial T_i$ de cada $T_i$ é un triángulo.
- $\overline{R}=\cup_{i=1}^k\overline{T_i}$.
- Se $i\neq j$ entón $\overline{T_i}\cap\overline{T_j}=\emptyset$ ou $\overline{T_i}\cap\overline{T_j}$ é unha arista ou un vértice común.
Cada un dos $T_i$ da triangulación chámanse caras, cada arista de cada $T_i$ é unha arista da triangulación, e cada vértice de cada $\partial T_i$ é un vértice da triangulación. O número de cada un deles denótase $C$, $A$ e $V$ respectivamente.
Chámase característica de Euler da rexión $R$ (con respecto da triangulación $\mathcal{T}$) a $C-A+V$.
As seguintes interseccións non pertencerían a triangulación válidas, xa que os triángulos non se intersecan correctamente.
As interseccións de triángulos que se amosan non son correctas para unha triangulación.
Os seguintes triángulos si se intersecan correctamente.
As interseccións de triángulos que van a continuación si serían válidas para unha triangulación.
Sexa $R$ unha rexión nunha superficie $S$. Entón:
- $R$ admite unha triangulación.
- A característica de Euler non depende da triangulación escollida.
- A característica de Euler é un invariante topolóxico: se $R$ e $\tilde{R}$ son dúas rexións homeomorfas, entón a súa característica de Euler é a mesma.
En virtude da proposición anterior, a característica de Euler dunha rexión denotarase de xeito non ambiguo por $\chi(R)$.
Calculámo-la característica de Euler dalgunhas rexións. Para iso basta con atopar algunha triangulación da rexión dada, xa que a característica de Euler é a mesma para calquera triangulación.
A característica de Euler dunha rexión simple $R$ é $\chi(R)=1$. En realidade unha rexión simple é homeomorfa a un triángulo e así $C=1$, $A=3$, $V=3$.
A continuación calculámo-la característica de Euler dunha rexión $R$ homeomorfa a un anel circular. Recordemos ademais que unha rexión tal tamén é homeomorfa a un cilindro. Presentamos unha posible triangulación, que non ten por que se-la máis eficiente, pero que é relativamente sinxela de pintar.
Para a triangulación da rexión homeomorfa ó anel circular temos $C=12$, $A=24$, $V=12$. Por tanto, a característica de Euler da rexión é $\chi(R)=0$.
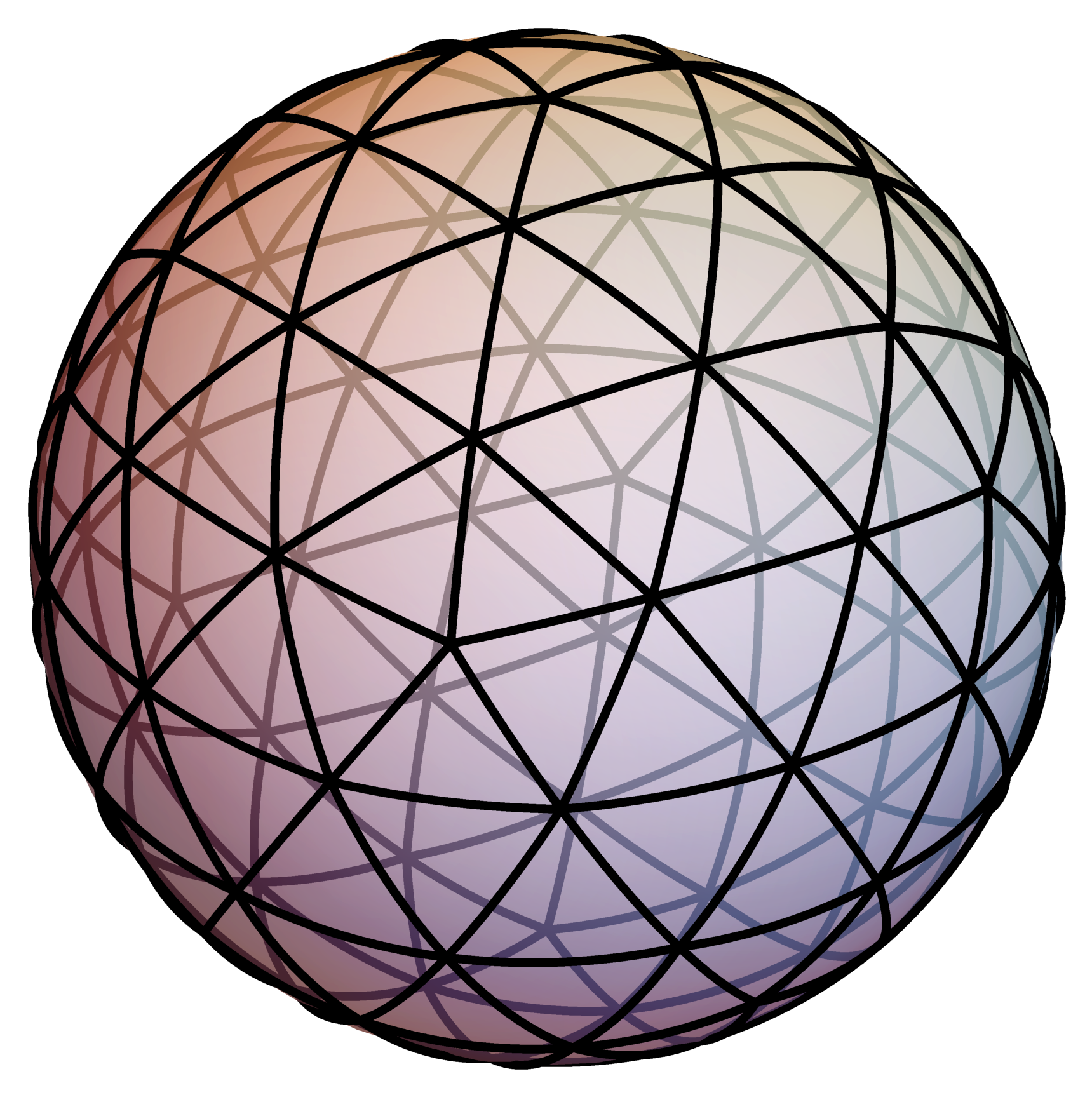
A continuación preséntanse dúas posibles triangulacións da esfera.
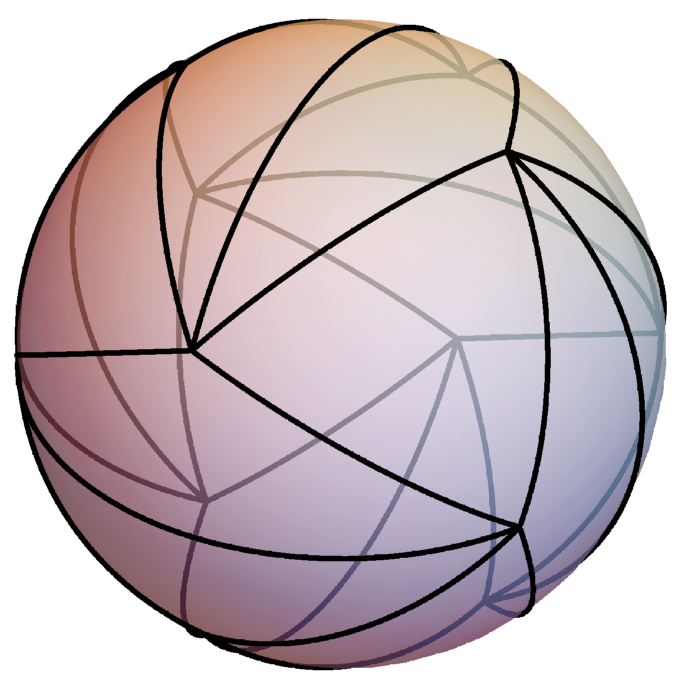

Non obstante, a triangulación máis simple posible da esfera consiste en darse conta de que esta é homeomorfa a un tetraedro. Neste caso temos $C=4$, $A=6$, $V=4$. Por tanto $\chi(\mathbb{S}^2)=2$.
A característica de Euler da esfera é un invariante topolóxico que é coñecido na educación elemental cando se estudian os poliedros.
Finalmente calculámo-la característica de Euler do toro $\mathsf{T}^2$.
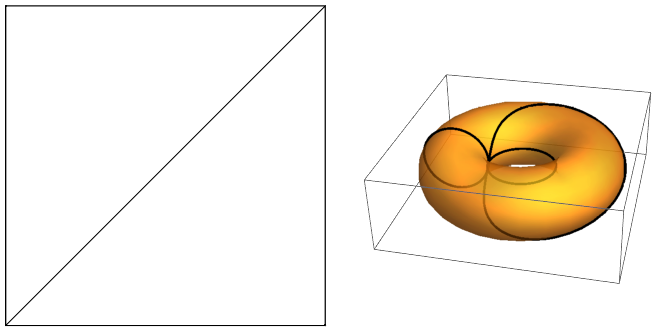
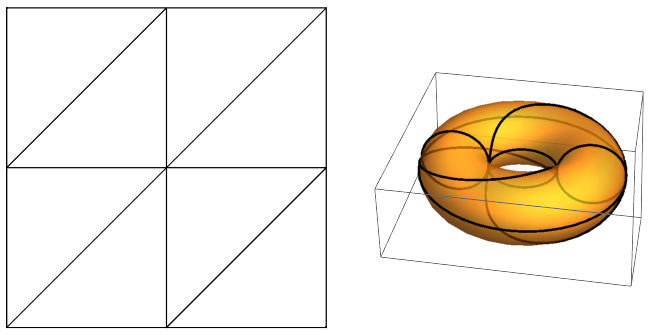
Neste caso cómpre ter tino coas interseccións dos triángulos, xa que se tomamos moi poucos non se cumplen os axiomas de triangulación como amosan as figuras adxuntas de triangulacións non válidas do toro.
Recordemos que un toro é homeomorfo ó espacio topolóxico cociente resultante de identificar dous a dous os lados dun cadrado.
A triangulación que se presenta non é a máis eficiente, pero cumple os axiomas de triangulación. Para esta $C=18$, $A=27$, $V=9$, e por tanto, $\chi(\mathsf{T}^2)=0$.
A característica de Euler pode definirse non soamente para triangulacións, senón para calquera subdivisión en polígonos, non necesariamente todos cos mesmos lados, sempre e cando se cumpla a condición de que ou non se intersecan, ou se intersecan en todo un lado ou nun vértice. Para ver isto, basta con subdividi-los polígonos en triángulos e ver que na nova subdivisión se cancelan as sumas.
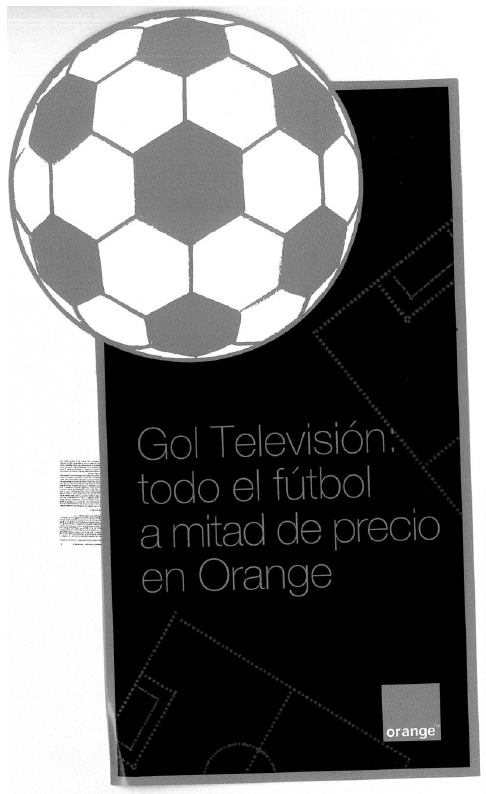
No anuncio adxunto preséntase unha subdivisión da esfera en hexágonos, o cal é imposible desde o punto de vista topolóxico se se preserva a regularidade nas subdivisións que se ve na parte visible do balón. Se $C$ é o número de hexágonos, o número de aristas é $A=6C/2$, xa que cada hexaedro ten $6$ aristas pero a mesma arista está compartida por dúas caras, e o número de vértices é $V=6C/3$, xa que cada hexaedro ten $6$ vértices pero cada vértice está compartido por $3$ caras. En total, teriamos que a característica de Euler da esfera sería \[ \chi(\mathbb{S}^2)=C-6C/2+6C/3=0, \] o que é imposible.
Sexa $S$ unha superficie regular compacta, conexa, e orientable. Entón:
- A característica de Euler de $S$ é $2$ (esfera), $0$ (toro), $-2$ (2-toro), $-4$ (3-toro), …, $-2n+2$ (n-toro).
- Se $\tilde{S}$ é outra superficie compacta, conexa, e orientable, entón $S$ é homeomorfa a $\tilde{S}$ se e só se $\chi(S)=\chi(\tilde{S})$.
Tamén se chama xénero dunha superficie compacta, conexa, e orientable ó número de buratos, é dicir, $g(S)=\frac{2-\chi(S)}{2}$, que por tanto tamén serve para clasificalas topoloxicamente.
Concretamente, se $S$ é compacta, conexa, e orientable, entón $g(S)=0,1,2,\dots$ e $S$ é homeomorfa a:
- Unha esfera se $g(S)=0$.
- Un n-toro se $g(S)>0$.
Sexa $S$ unha superficie orientada e $R\subset S$ unha rexión. Entón:
- Existe unha familia de parametrizacións positivamente orientadas ${\mathbf{x}^i\colon U_i\subset\R^2\to S}$ que recubren $S$, sendo cada $U_i$ unha bóla de $\R^2$.
- Existe unha triangulación $\mathcal{T}=\{T_1,\dots, T_k\}$ de $S$ tal que cada triángulo $T_i$ está contido nalgunha das veciñanzas coordenadas $\mathbf{x}^j(U_j)$.
Por tanto, dada unha rexión $R$ dunha superficie orientada $S$, escolleremos unha triangulación $\mathcal{T}=\{T_1,\dots,T_k\}$ nas condicións anteriores. Nese caso tomaremos en cada $\partial T_i$ a orientación positiva (dentro de $\mathbf{x}^j(U_j)$).
A observación clave que necesitamos facer agora é que cando dous triángulos contidos nun aberto coordenado como o anterior teñen unha arista en común, a orientación de dita arista como arista dun dos triángulos será oposta á orientación desa arista como arista do triángulo contiguo.
Nestas condicións dámoslle ó borde a orientación inducida pola orientación dos triángulos da triangulación.
Recordemos que, intuitivamente, o borde dunha rexión está orientado positivamente cando ó mirar cara á superficie con vector normal apuntando cara nós, o borde percórrese de xeito que a rexión queda do lado esquerdo.
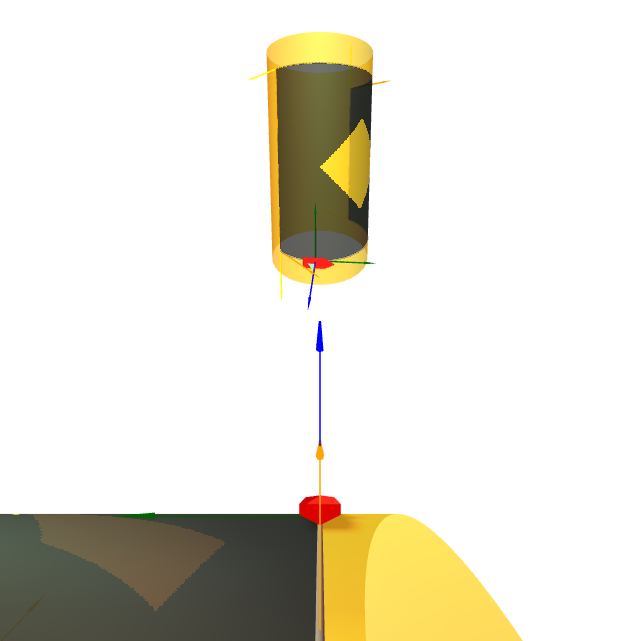
Na gráfica preséntase unha rexión que non é simple, pero fixémonos que co vector normal saínte o vehículo recorre o borde deixando a rexión gris á súa esquerda, tanto para o borde exterior (recorrido en sentido antihorario segundo se mira) como para o interior (recorrido en sentido horario segundo se mira).
Sexa $S$ unha superficie regular orientada e $R$ unha rexión con fronteira $\partial R$ positivamente orientada. Entón, \[ \int_R K+\int_{\partial R}\kappa_g+\sum_{i=1}^k\epsilon_i=2\pi\chi(R), \] onde $\epsilon_1,\dots,\epsilon_k$ son os ángulos exteriores nos vértices de $\partial R$.
Sexa $\mathcal{T}=\{T_1,\dots,T_C\}$ unha triangulación da rexión $R$ de xeito que cada $T_i$ está contido nunha veciñanza coordenada ortogonal, positivamente orientada e homeomorfa a unha bóla. Denotamos por $C$ ó número de caras, por $A$ ó número de aristas, e por $V$ ó número de vértices.
Pola versión local do teorema de Gauss-Bonnet para cada triángulo, temos \[ \int_{T_i}K+\sum_{j=1}^3\int_{\alpha_{ij}}\kappa_g +\sum_{j=1}^3\epsilon_j^i=2\pi, \] onde $\{\epsilon_1^i,\epsilon_2^i,\epsilon_3^i\}$ son os ángulos exteriores do triángulo $\partial T_i$, e $\alpha_{ij}$ son os lados de $\partial T_i$.
Como $\overline{R}=\cup_{i=1}^C \overline{T_i}$, e $\overline{T_i}\cap\overline{T_j}$ ten medida cero con $i\neq j$, sumando obtemos \[ \begin{aligned} 2\pi C &{}=\sum_{i=1}^C\left( \int_{T_i}K+\sum_{j=1}^3\int_{\alpha_{ij}}\kappa_g+\sum_{j=1}^3\epsilon_j^i \right)\\ &{}=\int_R K+\sum_{i=1}^C\sum_{j=1}^3\int_{\alpha_{ij}}\kappa_g +\sum_{i=1}^C\sum_{j=1}^3\epsilon_j^i. \end{aligned} \]
A continuación calculamos por separado os dous sumandos da expresión anterior que quedan por determinar.
En primeiro lugar empezamos coa integral da curvatura xeodésica nas aristas da triangulación. O que segue é un argumento combinatorio no que separámo-la suma en dúas partes: a suma das integrais da curvatura xeodésica das aristas que son interiores, e a correspondente suma das aristas que están no borde. Recordemos que as aristas interiores se percorren en sentidos opostos en triángulos contiguos, así que as integrais das súas curvaturas xeodésicas se cancelan dúas a dúas. Entón, \[ \begin{aligned} \sum_{i=1}^C\sum_{j=1}^3\int_{\alpha_{ij}}\kappa_g &{}=\sum_{\stackrel{i,j}{\text{$\alpha_{ij}$ interior}}}\int_{\alpha_{ij}}\kappa_g +\sum_{\stackrel{i,j}{\text{$\alpha_{ij}$ no borde}}}\int_{\alpha_{ij}}\kappa_g\\[1ex] &{}=\int_{\partial R}\kappa_g. \end{aligned} \]
Fixámonos agora na suma dos ángulos exteriores nos vértices dos triángulos da triangulación.
Un vértice de $\mathcal{T}$ pode estar no borde de $R$ ou ser interior. Denotamos, respectivamente, o seu número por $V_{ext}$ e $V_{int}$. Por tanto, $V=V_{ext}+V_{int}$. Observamos que se $\epsilon_j^i$ denota o ángulo exterior no vértice dun triángulo, entón $\pi-\epsilon_j^i$ será o ángulo interior nese vértice. Ademais, se o vértice é interior á rexión, entón a suma de tódolos ángulos interiores que conflúen nese vértice ten que ser $2\pi$.
Analogamente, unha arista pode estar no borde ou non. Ó seu número respectivo denotarémolo por $A_{ext}$ e $A_{int}$. Así $A=A_{ext}+A_{int}$.
Empezámo-lo cálculo da suma dos ángulos nos vértices: \[ \begin{aligned} \sum_{i=1}^C\sum_{j=1}^3\epsilon_j^i &{}=\sum_{i=1}^C\sum_{j=1}^3(\pi-\pi+\epsilon_j^i)\\ &{}=3\pi C-\sum_{i=1}^C\sum_{j=1}^3(\pi-\epsilon_j^i)\\ &{}=3\pi C -\sum_{\stackrel{i,j}{\text{interior}}}(\pi-\epsilon_j^i) -\sum_{\stackrel{i,j}{\text{no borde}}}(\pi-\epsilon_j^i)\\ &{}=3\pi C-2\pi V_{int} -\sum_{\stackrel{i,j}{\text{no borde}}}(\pi-\epsilon_j^i). \end{aligned} \]
Os vértices do borde á súa vez dividirémolos en dúas familias disxuntas. Por un lado, denotemos por $\sigma$ ó conxunto de vértices de $\partial R$. Estes son os $k$ vértices orixinais do enunciado nos que temos os ángulos exteriores $\epsilon_1,\dots,\epsilon_k$. Por outra lado, sexa $\tau$ o conxunto dos vértices que están en $\partial R$ pero que foron introducidos pola triangulación (é dicir, que en realidade, como puntos de $\partial R$ son regulares). Ó número de todos eles denotarémolo por $\lvert\tau\rvert$. Obviamente tamén temos $V_{ext}=k+\lvert\tau\rvert$, xa que $\sigma$ e $\tau$ teñen como unión (disxunta) o conxunto de tódolos vértices que están $\partial R$.
Agora hai que ter en conta que nos vértices do borde que foron introducidos pola tringulación o ángulo que temos é chan porque estamos en puntos de regularidade da parametrización do borde, así que a suma dos ángulos interiores nese vértice é $\pi$.
Consideremos agora un vértice orixinal de $\partial R$, con ángulo exterior $\epsilon_\alpha$. Sexa $\sigma_\alpha$ o conxunto dos ángulos interiores nese vértice de triángulos de $\mathcal{T}$. Obviamente, o ángulo interior de $\partial R$ nese vértice coincide coa suma de tódolos ángulos interiores de triángulos que conflúen nese vértice, é dicir, \[ \pi-\epsilon_\alpha =\sum_{\stackrel{i,j}{\text{en $\sigma_\alpha$}}}(\pi-\epsilon_j^i). \] Sumando en tódolos vértices de $\partial R$ e despexando obtemos \[ \sum_{\stackrel{i,j}{\text{en $\sigma$}}}(\pi-\epsilon_j^i) =\pi k-\sum_{i=1}^k\epsilon_i. \]
Continuando co cálculo anterior, \[ \begin{aligned} \sum_{i=1}^C\sum_{j=1}^3\epsilon_j^i &{}=3\pi C-2\pi V_{int} -\sum_{\stackrel{i,j}{\text{en $\sigma$}}}(\pi-\epsilon_j^i) -\sum_{\stackrel{i,j}{\text{en $\tau$}}}(\pi-\epsilon_j^i)\\ &{}=3\pi C-2\pi V_{int} -\pi k+\sum_{i=1}^k\epsilon_i -\pi\lvert\tau\rvert\\ &{}=3\pi C-2\pi V_{int}-\pi V_{ext}+\sum_{i=1}^k\epsilon_i\\ \end{aligned} \]
Agora témo-la seguinte relación: \[ 3C=2A_{int}+A_{ext}. \] En efecto, pois cada cara ten exactamente 3 aristas, cada arista interior está compartida por exactamente 2 triángulos, e cada arista non interior está exactamente nun triángulo.
Observamos tamén que o número de vértices exteriores está en correspondencia un a un co número de aristas exteriores (a correspondencia asígnalle a cada arista o vértice onde empeza): \[ \begin{aligned} \sum_{i=1}^C\sum_{j=1}^3\epsilon_j^i &{}=\pi(2A_{int}+A_{ext})-2\pi V_{int}-\pi V_{ext}+\sum_{i=1}^k\epsilon_i\\ &{}=2\pi A_{int}+\pi A_{ext} -2\pi V_{int}-2\pi V_{ext}+\pi V_{ext}+\sum_{i=1}^k\epsilon_i\\ &{}=2\pi A_{int}+\pi A_{ext} -2\pi V+\pi A_{ext}+\sum_{i=1}^k\epsilon_i\\ &{}=2\pi A-2\pi V+\sum_{i=1}^k\epsilon_i. \end{aligned} \]
Substituíndo, \[ \begin{aligned} 2\pi C &{}=\int_R K+\int_{\partial R}\kappa_g +2\pi A-2\pi V+\sum_{i=1}^k\epsilon_i, \end{aligned} \] e despexando obtense a fórmula de Gauss-Bonnet global \[ \begin{aligned} \int_R K+\int_{\partial R}\kappa_g +\sum_{i=1}^k\epsilon_i &{}=2\pi C-2\pi A+2\pi V\\ &{}=2\pi\chi(R), \end{aligned} \] como queriamos ver.
Sexa $S$ unha superficie compacta orientable. Entón, \[ \int_S K = 2\pi\chi(S). \]
Simplemente hai que observar que para a fórmula global de Gauss-Bonnet neste caso non hai borde. A demostración tamén se pode ver como un caso máis sinxelo da anterior xa que o argumento pode repetirse tendo en conta que tódolos vértices e tódalas aristas son interiores.
Consecuencias dos teoremas de Gauss-Bonnet
Hai multitude de consecuencias xeométricas para o teorema de Gauss-Bonnet. A continuación presentamos soamente algunhas delas.
Unha superficie regular conexa, compacta, orientada, de curvatura positiva é homeomorfa a unha esfera.
Como $K>0$, temos $0<\int_S K=2\pi\chi(S)$, co que $\chi(S)>0$. Isto só é posible con $\chi(S)=2$ e sendo $S$ unha esfera de acordo co teorema que nos dá as características de Euler das superficies compactas orientables.
Sexa $S$ unha superficie regular conexa, compacta, orientada, e con curvatura de Gauss positiva. Entón dúas xeodésicas pechadas e simples calquera córtanse.
Sexan $\gamma_1$ e $\gamma_2$ dúas xeodésicas pechadas e simples que non se cortan. Como $S$ é conexa, compacta, e de curvatura positiva, obtemos que $S$ é homeomorfa a unha esfera. Logo, $\gamma_1$ e $\gamma_2$ determinan unha rexión $R$ en $S$ que é homeomorfa a unha coroa circular. Por tanto $\chi(R)=0$. Ademais, o borde é regular e formado por xeodésicas. Pola fórmula de Gauss-Bonnet obtemos $\int_R K=0$, o que contradí $K>0$.
Sexa $S$ unha superficie con curvatura negativa. Se dúas xeodésicas $\gamma_1$ e $\gamma_2$ se cortan en dous puntos distintos, a rexión que determinan non é simple.
Supoñamos que $S$ é unha superficie que satisfai $K<0$ en todo punto. Sexan $\gamma_1\colon[a_1,b_1]\to S$, e $\gamma_2\colon[a_2,b_2]\to S$, dúas xeodésicas que se cortan en dous puntos distintos $\gamma_1(a_1)=\gamma_2(a_2)$, $\gamma_1(b_1)=\gamma_2(b_2)$.
Considerémo-la rexión $R$ encerrada por $\gamma_1$ e $\gamma_2$. Denotamos por $\epsilon_1$ e $\epsilon_2$ os ángulos exteriores nos puntos de corte $\gamma_1(a_1)=\gamma_2(a_2)$, $\gamma_1(b_1)=\gamma_2(b_2)$ respectivamente. Nótese que $\epsilon_i\neq\pm\pi$, pois noutro caso, serían reparametrizacións da mesma xeodésica.
Pola fórmula de Gauss-Bonnet, \[ \begin{aligned} 2\pi\chi(R) &{}=\int_R K+\int_{\partial R}\kappa_g+\epsilon_1+\epsilon_2\\[1ex] &{}< \epsilon_1+\epsilon_2 < \pi+\pi =2\pi, \end{aligned} \] co que $\chi(R)\neq 1$. Como as rexión simples teñen característica de Euler igual a 1, chegamos a unha contradicción, e por tanto, $R$ non é simple.
Recordemos que a curvatura negativa afasta as xeodésicas (suficientemente preto dun punto), pero por cuestións topolóxicas, estas xeodésicas poden volver a atoparse.
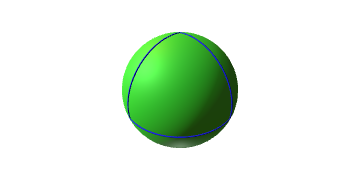
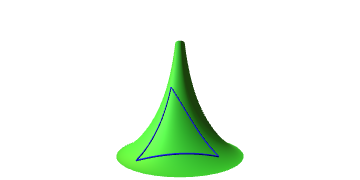
A suma dos ángulos interiores dun triángulo xeodésico nunha superficie chá é $\pi$.
Sexa $T$ é un triángulo tal que os seus lados son xeodésicas. Sexan $\epsilon_1$, $\epsilon_2$ e $\epsilon_3$ os ángulos exteriores e $\varphi_i=\pi-\epsilon_i$ os ángulos interiores. Como $K=0$ e $\kappa_g=0$ en $\partial T$, e $\chi(T)=1$, o teorema de Gauss-Bonnet di \[ \begin{aligned} 2\pi=2\pi\chi(T) &{}=\int_T K+\int_{\partial T}\kappa_g+\epsilon_1+\epsilon_2+\epsilon_3\\ &{}=3\pi-(\varphi_1+\varphi_2+\varphi_3), \end{aligned} \] de onde se deduce $\varphi_1+\varphi_2+\varphi_3=\pi$.
Coa mesma conta:
- En xeometría esférica a suma dos ángulos interiores dun triángulo é maior ca $\pi$.
- En xeometría hiperbólica a suma dos ángulos interiores dun triángulo é menor ca $\pi$.