Problemas de campos de vectores e orientación
Problemas de campos de vectores e orientación
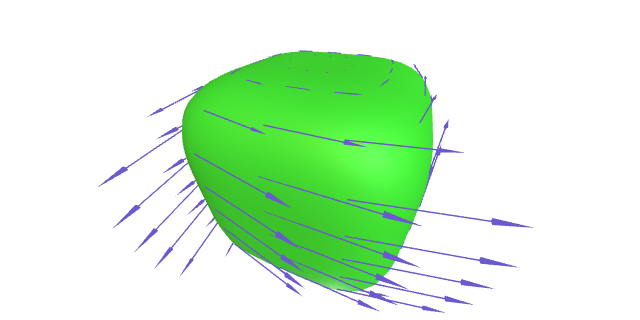
Sexan $S=\{(x,y,z)\in \mathbb{R}^3 : x^4+y^4+z^4=1\}$, e $\mathbf{W}$ o campo de vectores en $\mathbb{R}^3$ determinado por $\mathbf{W}(x,y,z)=(-y^3,x^3,0)$. Mostrar que $S$ é unha superficie regular e probar que $\mathbf{W}$ é un campo de vectores tanxente a $S$.
Definímo-la aplicación $F \colon \R^3 \to \R$, dada por $F(x, y, z)=x^4 + y^4 + z^4$, que ten por diferencial $\textup{d}F_{(x,y,z)} = (4x^3\, 4y^3\, 4z^3)$. Vemos que só se anula a diferencial para $(x,y,z) = (0,0,0)$. A superficie é $S = F^{-1}(\{1\})$. Polo teorema do valor regular $S$, é unha superficie regular, xa que $(0,0,0) \notin F^{-1}(\{1\})$.
O vector gradiente asociado a $F$ é $(\grad F)_{(x,y,z)} = (4x^3, 4y^3, 4z^3)$, que é un vector non nulo normal a $S$ en $(x,y,z) \in S$. Se facémo-lo producto escalar de $(\grad F)_{(x,y,z)}$ co campo $\textbf{W}$, temos \[ \begin{aligned} \langle \grad(F)_{(x,y,z)}, \textbf{W}(x,y,z) \rangle &{}= \langle (4x^3, 4y^3, 4z^3), (-y^3, x^3, 0) \rangle \\ &{}= -4x^3y^3 + 4x^3y^3 = 0, \end{aligned} \] co que vemos que $\textbf{W}$ é ortogonal a $\grad F$, é dicir, é tanxente á superficie $S$.
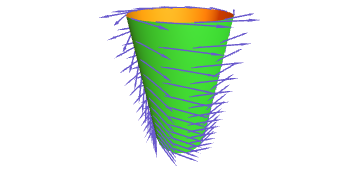
Considéranse os campos de vectores en $\mathbb{R}^3$ definidos por \[ \begin{aligned} \mathbf{W}(x,y,z)&{}=(-y,x,0),\\[1ex] \mathbf{T}(x,y,z)&{}=(\rot\, \mathbf{W})(x,y,z). \end{aligned} \]
- Probar que $\mathbf{W}$ e $\mathbf{T}$ son campos de vectores tanxentes ó cilindro $\{(x,y,z)\in\R^3:x^2+y^2=1\}$.
- Representar graficamente estes campos sobre as curvas $v$-paramétricas do cilindro.
- Probar que os fluxos de $\mathbf{W}$ e de $\mathbf{T}$ veñen dados por $\phi_t$ e $\psi_t$, respectivamente, onde \[ \begin{aligned} \phi_t(x,y,z) &{}=(x\cos t-y\sin t,\, x\sin t+y\cos t,\, z),\\[1ex] \psi_t(x,y,z) &{}=(x,y,z+2t). \end{aligned} \]
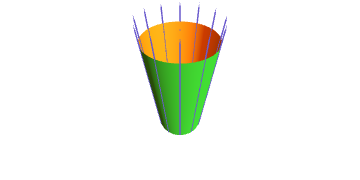
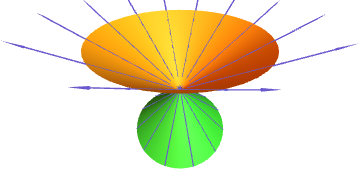
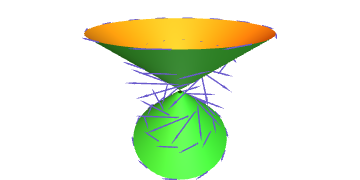
No conxunto aberto $\mathcal{U}=\{(x,y,z)\in \mathbb{R}^3 : z\neq 0\}$ considéranse os campos de vectores \[ \begin{aligned} \mathbf{X}(x,y,z) &{}=\Bigl(\frac{x}{z},\frac{y}{z},1\Bigr),\\[1ex] \mathbf{Y}(x,y,z) &{}=(\rot\, \mathbf{X})(x,y,z). \end{aligned} \]
- Probar que $\mathbf{X}$ e $\mathbf{Y}$ son campos de vectores tanxentes ó cono, que se pode parametrizar como $\mathbf{x}(u,v)=(u\,\cos v,u\,\sin v,u)$.
- Probar que o fluxo de $\mathbf{X}$ vén dado por $\phi_t(\mathbf{x}(u,v))=\mathbf{x}(u+t,v)$.
- Calcula-lo fluxo de $\mathbf{Y}$.
Probar que se unha superficie admite unha parametrización ortonormal (é dicir, $g_{11}=g_{22}=1$, $g_{12}=0$), entón a súa curvatura de Gauss é $K=0$ nesa veciñanza coordenada.
Como as $(g_{ij})$ son constantes, temos $\frac{\partial g_{ij}}{\partial u_k}=0$ para calquera $i,j,k\in\{1,2\}$. Por tanto, os símbolos de Christoffel anúlanse: \[ \Gamma_{ij}^k = \frac{1}{2} \sum_l g^{kl} \left(\frac{\partial g_{jl}}{\partial u_i} + \frac{\partial g_{il}}{\partial u_j} - \frac{\partial g_{ij}}{\partial u_l}\right)=0. \] Usando a fórmula de Gauss concluímos que $K=0$.
Probar que $S=\{(x,y,z)\in \mathbb{R}^3 : z-x^2y=0\}$ é unha superficie regular. Mostrar que é unha superficie orientable.
Considera-la superficie regular \[ S=\{(x,y,\cos x+\cos y)\in \mathbb{R}^3 : (x,y)\in (-2\pi,2\pi) \times (-2\pi,2\pi)\}. \] ¿É $S$ orientable?
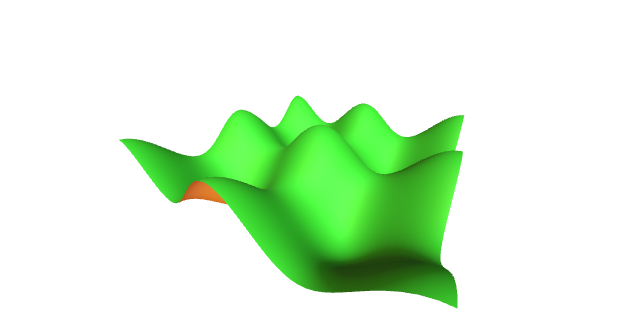
Mostra que o grafo de calquera función diferenciable $f\colon U\subset\R^2\to\R$ é unha superficie orientable.
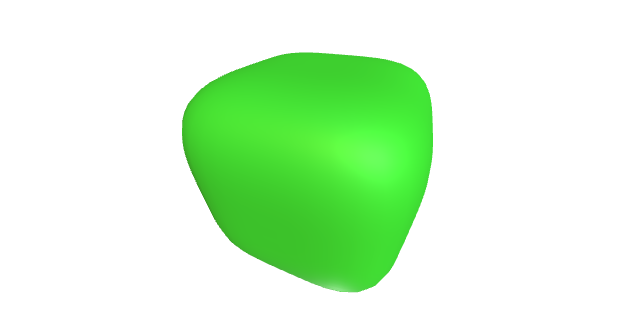
Proba que a superficie regular $S=\{(x,y,z)\in \mathbb{R}^3 : x^4+y^4+z^4=1\}$ é unha superficie orientable.
Procedemos de xeito similar a un exercicio anterior. Definímo-la aplicación $F \colon \R^3 \to \R$, dada por $F(x, y, z)=x^4 + y^4 + z^4$, que ten por diferencial $\textup{d}F_{(x,y,z)} = (4x^3\, 4y^3\, 4z^3)$. Vemos que só se anula a diferencial para $(x,y,z) = (0,0,0)$. A superficie é $S = F^{-1}(\{1\})$. Polo teorema do valor regular $S$, é unha superficie regular, xa que $(0,0,0) \notin F^{-1}(\{1\})$.
O vector gradiente asociado a $F$ é $(\grad F)_{(x,y,z)} = (4x^3, 4y^3, 4z^3)$, que é un vector non nulo normal a $S$ en $(x,y,z) \in S$. A súa norma vén dada por \[ \lVert(\grad F)_{(x,y,z)}\rVert =4\sqrt{x^6+y^6+z^6}, \] así que o campo de vectores \[ \begin{aligned} \textbf{N}_{(x,y,z)} &{}=\frac{(\grad F)_{(x,y,z)}}{\lVert(\grad F)_{(x,y,z)}\rVert}\\ &{}=\frac{(x^3, y^3, z^3)}{\sqrt{x^6+y^6+z^6}}, \end{aligned} \] con $(x,y,z)\in S$, é un campo de vectores normal unitario e globalmente definido en toda a superficie. Pola caracterización da orientabilidade en termos de vectores normais unitarios deducimos que $S$ é orientable.
Probar que se $S$ é unha superficie regular, conexa e orientable, entón existen exactamente dous campos de vectores diferenciables, normais e unitarios definidos en $S$.
Sexa $S$ unha superficie regular conexa e orientable. Pola caracterización da orientabilidade, isto implica que existe un campo de vectores normal unitario $\mathbf{N}$ definido en todo $S$.
Sea $\mathbf{X}$ un campo de vectores diferenciable normal e unitario definido en $S$. Como o espacio normal ten dimensión $1$, podemos poñer $\mathbf{X} = f\mathbf{N}$ para unha función $f \colon S \to \R$. Nótese que $\langle \mathbf{X}, \mathbf{N} \rangle = f$, co que $f$ é de clase $C^\infty$. Ademais, \[ 1 = \lVert\mathbf{X}\rVert = \lVert f\mathbf{N}\rVert = \lvert f\rvert\lVert\mathbf{N}\rVert = \lvert f\rvert, \] de xeito que $f \colon S \to \{-1,1\}$ é continua. Como $S$ é conexa e $\{-1,1\}$ é un conxunto discreto, $f$ é constante. Deducimos entón que $f = 1$, ou $f = -1$. Por tanto, $\mathbf{X} = \mathbf{N}$ ou $\mathbf{X} = -\mathbf{N}$, como queriamos ver.
Mostrar que se $F\colon S_1 \to S_2$ é un difeomorfismo entre superficies regulares, entón $S_1$ é orientable se e só se $S_2$ é orientable.
Sexa $F \colon S_1 \to S_2$ un difeomorfismo entre superficies. Supoñamos que $S_1$ é orientable e vexamos que $S_2$ tamén o é. O recíproco é aplica-lo mesmo razoamento a $F^{-1}$.
Como $S_1$ é orientable, existe unha familia de parametrizacións $\{\textbf{x}^{\lambda} \colon U_{\lambda} \to S_1\}_{\lambda \in \Lambda}$ tales que $S = \cup_{\lambda \in \Lambda} \textbf{x}^{\lambda}(U_{\lambda})$, e se $\textbf{x}^{\lambda}(U_{\lambda}) \cap \textbf{x}^{\mu}(U_{\mu}) \neq \emptyset$, entón $\det(\textup{d}((\textbf{x}^{\mu})^{-1} \circ \textbf{x}^{\lambda})) > 0$.
Definimos $\textbf{y}^{\lambda} \colon U_{\lambda} \to S_2$ como $\textbf{y}^{\lambda} = F \circ \textbf{x}^{\lambda}$, con $\lambda \in \Lambda$. Como $F$ é un difeomorfismo, $\{{\textbf{y}^{\lambda} \colon U_{\lambda} \to S_2}\}_{\lambda \in \Lambda}$ é unha familia de parametrizacións tal que $\cup_{\lambda \in \Lambda} \textbf{y}^{\lambda}(U_{\lambda}) = S_2$, e se $\textbf{y}^{\lambda}(U_{\lambda}) \cap \textbf{y}^{\mu}(U_{\mu}) \neq \emptyset$, entón \[ \begin{aligned} \det(\textup{d}((\textbf{y}^{\mu})^{-1} \circ \textbf{y}^{\lambda})) &{}= \det(\textup{d}((\textbf{x}^{\mu})^{-1} \circ F^{-1} \circ F \circ \textbf{x}^{\lambda}))\\ &{}= \det(\textup{d}((\textbf{x}^{\mu})^{-1} \circ \textbf{x}^{\lambda})) > 0. \end{aligned} \]
Por tanto, $S_2$ é orientable.
Considerar unha superficie $S=S_1\cup S_2$, onde $S_1$ e $S_2$ son superficies orientables con intersección $S_1\cap S_2$ conexa. Probar que entón $S$ é orientable.
Sexa $S$ unha superficie regular cuberta por dous entornos coordenados conexos $\mathcal{V}_1$ e $\mathcal{V}_2$.
- Mostrar que se a intersección $\mathcal{V}_1\cap\mathcal{V}_2$ ten unha única compoñente conexa, entón $S$ é orientable.
- Mostrar que se $\mathcal{V}_1\cap\mathcal{V}_2$ ten dúas compoñentes conexas $\mathcal{W}^+$ e $\mathcal{W}^-$ e o jacobiano do cambio de coordenadas é positivo en $\mathcal{W}^+$ e negativo en $\mathcal{W}^-$, entón $S$ non é orientable.
Probar que un difeomorfismo entre superficies orientadas $f\colon S_1\to S_2$ preserva a orientación se e só se para cada parametrización positivamente orientada $\mathbf{x}\colon U\subset\R^2\to S_1$ de $S_1$, $f\circ\mathbf{x}$ é unha parametrización positivamente orientada de $S_2$.
O primeiro que observamos é que, como $f$ é un difeomorfismo entre superficies, $\textbf{y} = f \circ \textbf{x}$ é unha parametrización de $S_2$ para calquera parametrización $\textbf{x}$ de $S_1$.
($\Rightarrow$) Supoñamos primeiro que $f$ preserva a orientación. Tomemos $\mathbf{x}\colon U\to S_1$ unha parametrización positivamente orientada. Sexa $\{\textbf{y}^{\lambda} \colon V_{\lambda} \to S_2\}_{\lambda \in \Lambda}$ unha familia de parametrizacións que determinan a orientación de $S_2$. Temos que ver que $\mathbf{y}=f\circ\mathbf{x}$ satisfai $\det(\textup{d}(\mathbf{y}^{-1}\circ\mathbf{y}^\lambda))>0$ sempre que $\mathbf{y}(U)\cap\mathbf{y}^\lambda(V_\lambda)\neq\emptyset$.
Supoñamos pois que $q\in\mathbf{y}(U)\cap\mathbf{y}^\lambda(V_\lambda)$ para certo $\lambda\in\Lambda$. Poñamos $q=f(p)$, $p=\mathbf{x}(u)$, e $q=\textbf{y}^{\lambda}(v)$, con $u\in U$, $v\in V_\lambda$. Como $\mathbf{x}$ está positivamente orientada, a base $(\mathbf{x}_1(u),\mathbf{x}_2(u))$ está positivamente orientada. Como $f$ preserva a orientación, $(\mathbf{y}_1(u),\mathbf{y}_2(u))=(\textup{d}f(\mathbf{x}_1),\textup{d}f(\mathbf{x}_2))$ tamén está positivamente orientada. Entón $(\textbf{y}_1(u), \textbf{y}_2(u))$ e $(\textbf{y}_1^{\lambda}(v), \textbf{y}_2^{\lambda}(v))$ definen a mesma orientación. Como a matriz de cambio de base entre ellas é $\textup{d}(\textbf{y}^{-1} \circ \textbf{y}^{\lambda})$, deducimos que $\det(\textup{d}((\textbf{y}^{-1} \circ \textbf{y}^{\lambda})(v))) > 0$. Como a elección do punto $q$ foi arbitraria, deducimos que $\det(\textup{d}(\textbf{y}^{-1} \circ \textbf{y}^{\lambda})) > 0$, e polo tanto, $\textbf{y}$ está positivamente orientada.
($\Leftarrow$) Reciprocamente, supoñamos que $f$ manda parametrizacións positivamente orientadas de $S_1$ en parametrizacións positivamente orientadas de $S_2$. Sexa $p\in S_1$, e $\mathbf{x}\colon U\to S_1$ unha parametrización positivamente orientada en $p$. Poñamos $p=\mathbf{x}(u)$, $u\in U$. Logo $(\mathbf{x}_1(u),\mathbf{x}_2(u))$ é unha base positivamente orientada de $T_p S_1$. Por hipótese, $\mathbf{y}=f\circ\mathbf{x}$ é unha parametrización positivamente orientada de $S_2$. Entón $(\textbf{y}_1(u), \textbf{y}_2(u)) = (\textup{d}f_p(\textbf{x}_1(q)), df_p(\textbf{x}_2(q)))$ está positivamente orientada. Como preserva-la orientación é unha relación de equivalencia, $\textup{d}f_p$ preserva a orientación. Como $p\in S_1$ era arbitrario, tamén o fai $f$.
Sexa $f\colon S_1\to S_2$ un difeomorfismo entre superficies orientadas, con $S_1$ conexa. Probar que $f$ preserva a orientación se e só se existe $p\in S_1$ tal que a diferencial $df_p\colon T_p S_1\to T_{f(p)}S_2$ preserva a orientación.
Sexa $S$ unha superficie orientada cun campo de vectores normal e unitario $\mathbf{N}$ positivamente orientado. Probar que unha base (ordeada) $(v_1,v_2)$ de $T_p S$ está positivamente orientada se e só se $\det(v_1,v_2,\mathbf{N}_p) > 0$.
Sexan $(v_1, v_2)$ unha base de $T_p S$, e $\textbf{x} \colon U \subset \R^2 \to S$ unha parametrización positivamente orientada con $p = \textbf{x}(u)$, $u \in U$. Entón \[ \textbf{N}_p = \frac{\textbf{x}_1 \times \textbf{x}_2} {\lVert\textbf{x}_1 \times \textbf{x}_2\rVert}(u). \]
Recordemos que \[ \frac{v_1 \times v_2}{\lVert v_1 \times v_2\rVert} = \mathop{\rm signo}(\det(A)) \textbf{N}_p, \] sendo $A$ a matriz de cambio de base de $(v_1, v_2)$ a $(\textbf{x}_1(u), \textbf{x}_2(u))$. Entón $(v_1, v_2)$ está positivamente orientada se e só se $\mathop{\rm signo}(\det(A)) = +1$, se e só se $\det A> 0$, se e só se $\frac{v_1 \times v_2}{\lVert v_1 \times v_2\rVert} = \textbf{N}_p$.
Por tanto, se $(v_1,v_2)$ está positivamente orientada, entón \[ \begin{aligned} \det(v_1,v_2,N_p) &{}=\det\left(v_1,v_2,\frac{v_1\times v_2} {\lVert v_1\times v_2\rVert}\right)\\ &{}=\langle v_1\times v_2, \frac{v_1\times v_2}{\lVert v_1\times v_2\rVert}\rangle\\ &{}=\lVert v_1\times v_2\rVert > 0. \end{aligned} \]
Reciprocamente, \[ \begin{aligned} 0 &{}<\det(v_1,v_2,N_p)\\ &{}=(\mathop{\rm signo}\det A) \det\left(v_1,v_2,\frac{v_1\times v_2}{\lVert v_1\times v_2\rVert}\right)\\ &{}=(\mathop{\rm signo}\det A) \lVert v_1\times v_2\rVert, \end{aligned} \] co que $\det A > 0$ e $(v_1,v_2)$ está positivamente orientada.
Sexa $S$ unha superficie orientada con estructura complexa $J$. Sexan $p\in M$ e $v,w\in T_p M$ dous vectores unitarios. Probar que se o ángulo orientado de $v$ a $w$ é $\epsilon\in(-\pi,\pi)$, entón o ángulo orientado de $w$ a $v$ é $-\epsilon$.
Se o ángulo orientado de $v$ a $w$ é $\epsilon\in(-\pi,\pi)$, iso quere dicir que \[ w=\cos(\epsilon)v+\sin(\epsilon)J_p v. \]
Aplicando $J_p$ á igualdade anterior temos $J_p w=\cos(\epsilon)J_p v - \sin(\epsilon) w$. Empregando isto temos \[ \begin{aligned} \cos(-\epsilon)w+\sin(-\epsilon)J_p w={} &{}\cos(\epsilon)w-\sin(\epsilon)J_p w\\ {}={}&{}\cos(\epsilon)(\cos(\epsilon)v+\sin(\epsilon)J_p v)\\ &{}-\sin(\epsilon)(\cos(\epsilon)J_p v - \sin(\epsilon) w)\\ {}={}&\cos^2(\epsilon)v+\sin(\epsilon)\cos(\epsilon)J_p v\\ &{}-\sin(\epsilon)\cos(\epsilon)J_p v+\sin^2(\epsilon)v\\ {}={}&v, \end{aligned} \] o que significa que o ángulo orientado de $w$ a $v$ é $-\epsilon$.
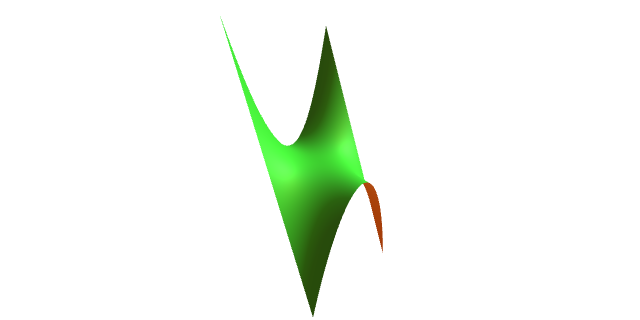
Sexa $S$ a superficie $\mathbf{x}(\R^2)$ onde \[ \mathbf{x}(u,v)=(u,\,v,\,uv). \] Consideremos que $\mathbf{x}$ está positivamente orientada. Calcula-lo ángulo orientado que forman os seguintes vectores:
- $(1,0,0)$, $(0,1,1)\in T_{(1,0,0)}S$.
- $(0,1,1)$, $(1,1,2)\in T_{(1,1,1)}S$.
- $(-1,-1,0)$, $(1,0,0)\in T_{(0,0,0)}S$.
Sexan $V$ e $\tilde{V}$ espacios vectoriais orientados de dimensión $2$, e $L\colon V\to \tilde{V}$ un isomorfismo linear que preserva a orientación. Sexa $(e_1,e_2)$ unha base ortonormal positivamente orientada de $V$. Consideremos \[ \tilde{e}_1=\frac{L(e_1)}{\lVert L(e_1)\rVert}, \] e $\tilde{e}_2$ o único vector unitario de $\tilde{V}$ que é ortogonal a $\tilde{e}_1$ e que fai de $(\tilde{e}_1,\tilde{e}_2)$ unha base ortonormal positivamente orientada de $\tilde{V}$. Poñamos $v=ae_1+be_2\neq 0$ e $L(v)=\tilde{a}\tilde{e}_1+\tilde{b}\tilde{e}_2$. Probar que se $(\tilde{a},\tilde{b})=\lambda(a,b)$ con $\lambda\in\R$, entón $\lambda> 0$.
Supoñamos $(\tilde{a},\tilde{b})=\lambda(a,b)$, $\lambda\leq 0$.
Poñamos $L(e_2)=x\tilde{e}_1+y\tilde{e}_2$. Como $L$ é un isomorfismo que preserva a orientación, $(L(e_1),L(e_2))$ é unha base positivamente orientada de $\tilde{V}$. En particular, a matriz de cambio de base de $(L(e_1),L(e_2))$ a $(\tilde{e}_1,\tilde{e}_2)$ ten determinante positivo, é dicir, \[ 0< \begin{vmatrix} \lVert L(e_1)\rVert & x\\ 0 & y \end{vmatrix} =y\lVert L(e_1)\rVert, \] de onde se deduce $y>0$.
Agora temos \[ \begin{aligned} \lambda a\tilde{e}_1+\lambda b\tilde{e}_2 &{}=\tilde{a}\tilde{e}_1+\tilde{b}\tilde{e}_2\\ &{}=L(v)=a L(e_1)+b L(e_2)\\ &{}=a\lVert L(e_1)\rVert\tilde{e}_1+b(x\tilde{e}_1+y\tilde{e}_2)\\ &{}=(a\lVert L(e_1)\rVert+bx)\tilde{e}_1+by\tilde{e}_2, \end{aligned} \] de onde obtemos \[ \begin{aligned} (\lambda-\lVert L(e_1)\rVert)a-xb &{}=0,\\ (\lambda-y)b &{}=0. \end{aligned} \] Como $\lambda\leq 0$ e $y>0$ isto implica $a=b=0$, en contra do suposto. Logo $\lambda> 0$.